The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Remember: this is not a production quality programmer! See the
data sheets from Microchip for more information about what
that means.
����������picprog-1.9.1/picprog.html��������������������������������������������������������������������������0000644�0000765�0000765�00000123712�11361223735�014164� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Jaakko Hyvätti Picprog 1.9.1 documentation
http://www.iki.fi/hyvatti/pic/picprog.html
Jaakko Hyvätti Picprog 1.9.1 documentation
2010-04-14
PIC16, PIC12 and PIC18 microcontroller programmer for Linux and Windows/Cygwin.
Translations of some version of this document: Dutch
Background reading
Requirements
Hardware
Installation
Usage
Burning PICs
Reading PICs
Exit values
Internals
Changes
Other available programmers
Available languages
Other software
History
Copyright notice
PICmicro microcontrollers, or MCUs, are fine chips that are especially
easy to program with a simple device attached to a parallel or serial
port. Because of the EEPROM or Flash memory, they are also easy and
fast to erase and reprogram without need for UV equipment. This makes
them very popular among electronics hobbyists.
At the moment this is the second implementation of a PIC programmer
for Linux that works with the very simple and cheap serial port
programmers. The first one I know was made by Ralph Metzler in 1996. My
programmer was originally designed for PIC16C84 and PIC16F84 chips
back in 1997, and since then I have implemented other chips without
access to most of them. I have tested PIC16F628, PIC16F676,
PIC12F675, PIC16F88, PIC16F876A, PIC16F76, PIC18F1320 and PIC18F458.
Others have used many other models. The dsPIC30 family has some code
in the sources, but the support is not finished yet. Some 12 bit
chips should be supported but I have not tested that support.
You really should take a look at the Microchip www-pages and read the
device datasheets and programming specifications there.
Maybe the best source for PIC information is the home page of PICLIST discussion
group. Also historically a good collection of links and software for
PIC was in David Tait's
PIC links page and in GNUPIC
pages. I have also documented here the software I took a look at back
in 1997. I have focused into Linux support, so I have never used
any DOS software mentioned.
Serial port pic programming hardware
See the hardware section. This device is connected to a usual
serial port of your PC, and is the same device as used with many DOS
PIC burning programs.
A serial port
Having a serial port on a computer is not really that usual any
more. Often a serial port is optional on computer motherboards and
they do not come with 9 pin or 25 pin connector installed. USB serial
port adapters can be used in Linux and Windows/Cygwin. However they
offer very slow performance, as every bit transmitted needs serial
control lines to be toggled on and off, and each of these operations
takes milliseconds over the USB line protocol. Prepare to wait
minutes to hours instead of seconds when programming with USB serial
port adapter.
C++ compiler (g++)
This program is written in C++, so you need a C++ compiler to
compile it. This you should already have installed on your Linux
system or Windows/Cygwin system.
Linux kernel version 2.0.32 or 2.1.45 or later.
This programmer needs some functionality in Linux serial driver
that as of kernel versions 2.0.32 and 2.1.45 is available in standard
kernels. The programmer uses TIOCSBRK and TIOCCBRK ioctl to control
the state of TxD serial port output accurately. These ioctl's are
standard on BSD flavor unixes, like SunOS 4, but they may still are
unimplemented on some serial drivers in Linux kernel.
Cygwin DLL version 1.5.8 or later
(For Windows installations only) Earlier Cygwin versions do not
contain the necessary TIOCSBRK and TIOCCBRK ioctl functionality.
A compiler for PIC
Your assembler, or C compiler, or whatever, should produce either
Intel IHX32, IHX16, or IHX8M format hex files. For assembler on Linux I
recommend GNU PIC
Utilities gpasm.
Use a serial port programmer device with the following pinouts:
TxD
Programming voltage, pin /MCLR
RTS
Clock pulse, pin RB6
DTR (output), CTS (input)
Serial data, pin RB7
A good programmer like this is for example PIC-Programmer 2
designed by Jens Madsen .
Some later chips with internal oscillator modes may need a bit more
complicated designs or the reprogramming of the chips can be
unreliable. See JDM-B: JDM Programmer
Modification: Automatic Vcc Control or RCD programmer .
I have heard that other programmers work also, for example TE20
and Olimex PG2C have been tested
with Picprog.
The description below is based on old version of JDM hardware. As you
can see above, there are better designs by Jens Madsen and others
available, please use them instead. Note however that for example the
latest Jens Madsen PCB does not support PIC16F628A that needs to have
pin 10, RB4/PGM grounded. Please modify the PCB to ground this pin if
your chip has PGM on pin 10.
I made a minor modification to the jdm84v23 schema and pcb mask,
because I thought D4 was stressed on positive clock pulses - it short
circuits the rs-232 RTS pin to GND. I added a 10k resistor between D4
and D3. But it also is not absolutely required, as the clock pulses
are short and rs-232 is protected for short circuits anyway. Now I
have noticed that this resistor makes the programmer less reliable,
especially with later PIC chips, like PIC16F76 and PIC18 family. If
you have built the hardware I previously suggested, and it does not
work, please short circuit that resistor or build the new PCB from
Jens Madsen site. Also you can try this patch by Matthijs Kooijman to
test the levels of signals: picprog-slow-test.diff
. This is for an older version of picprog, so it does not apply
to current code, but you get the idea.
To support for example PIC16F628 and PIC16F88, which have a low
voltage programming mode, the circuit was again modified to ground the
RB3 pin 9 and the RB4 pin 10. This prevents the chip from entering
the low voltage programming mode. To support for example PIC12F675,
PIC16F630, and PIC16F676, pin 1 was connected to Vdd. Other jumpers
need to be installed as described below.
The schemantics diagram:
The 300 dpi pcb mask:
To support for example PIC16F876A and 16F76, which have different
pinouts for programming signals, you need an adapter that connects to
the external connector of the above programmer. Alternatively you
could redesign the pcb layout, but maybe it is easier to just solder
the adaptor. Solder the pins like this:
pcb 1 -- clk -- 27 (RB6) ic
connector 3 -- data -- 28 (RB7) socket
5 -- Vss -- 8,19,24
7 -- Vdd -- 20
9 -- Vpp -- 1
To support for example PIC12F675, PIC16F630 and PIC16F676, which have
different pinouts for programming signals but do not conflict with
PIC16C84 pins, you can solder jumper wires on the above pcb. You need
to connect pin 16 on the socket to clock (same as pin 12), pin 17 to
data (same as pins 11 and 13), and pin 18 on the socket to Vss (same
as pins 5-10). Note that pin 1 is already connected to Vdd in the
above PCB mask. If this connection is missing on your older PCB,
connect pin 1 to pin 14 with a wire.
Always check the correct pinouts for your chip from the datasheets
also!
For support for 3.3 volt in-circuit programming, see the
modified circuit by Krüpl Zsolt,
Hungary . The base of the transistor is moved from +5V to +3.45V
with the added 22k resistor to PIC ground.
There are binary packages available that have been prepared by helpful
users and operating system vendors. I know of the following, but
cannot offer any support for them. They might be for older versions,
but even if they are, check for the 10. Changes
section below if you really need a later version. Some new versions
of Picprog only fix small specific bug, which may not affect you at
all.
To install from source, download the picprog-1.9.1.tar.gz
package, if you do not already have it.
Check your system against the requirements mentioned above.
Untar the archive and change to the source file directory. You should
only have to type:
make dep
make
and the program should compile without errors or warnings. If it does
not, please check that your compiler, c and c++ libraries and
utilities like make are of a reasonably recent, bugfree and compatible
version.
After compilation you can, as a root user, just type:
make install
to install the program and manual page to /usr/local. Or just copy
the files picprog and picprog.1 manually.
Make sure that you have access to the serial port device like /dev/ttyS0
or /dev/ttyS1 with the user that you are running the program as.
The Linux emulator for Windows, Cygwin , allows Picprog to be
compiled on Windows plattforms.
To install Cygwin, go to www.cygwin.com and follow the
instructions there. In short, download setup.exe and run it. You
need to install at least the Developer packages Gcc C compiler, Gcc
C++ compiler, Make, and Binutils in addition to the default install.
To install Picprog on Cygwin, follow the above instructions for Linux
compilation from source.
Windows 2000 and XP installations that I have tried work fine. Windows 98
installations worked sometimes, and I suppose the timing routines of
Picprog do not work well on Windows 98, they even lock the computer
sometimes. I suggest using Windows 2000 or later.
If you are using USB serial adapters, they show up as /dev/ttyS13 or
higher numbers. Try different numbers if that does not work.
To get information about the usage of the program, just type the
program name. These options give information about the program:
--warranty, --copyright, --help
Display warranty or copyright information or the help text
with list of supported chip types.
--quiet, -q
Do not display the copyright notice.
The actual operation of the program is controlled by the options
--input-hexfile and --output-hexfile. If
the former is present, the program acts as a burner. If the
latter is specified, the program will read the contents of the PIC
device eeprom memories. Both may be specified on the same command
line, in which case the chip is first programmed and then read.
Simple instructions:
Compile your program into a hex file.
Insert the pic16c84 or other pic chip into the socket in the
programmer, or connect the in-circuit programming cable to your
device.
Connect the programmer device to a serial port.
If the device contains calibration information, like OSCCAL word
in program memory or BG bits in configuration word in PIC12F675, it is
a good idea to save these for later if this is the first time you
program the chip. See next chapter for more on
reading chip, but this should be enough for saving the calibration:
picprog --output saved-cal-chip1.hex --skip-ones --pic /dev/ttyS1
Burn the program with command:
picprog --burn --input file.hex --pic /dev/ttyS1
If the above command produces error output that suggests that the
chip was in the code protection state, or that the chip must be
completely erased before programming, retry with the following
command:
picprog --erase --burn --input file.hex --pic /dev/ttyS1
Wait for the program to complete. Burning 8192 program locations
on 14 bit devices may take 3 minutes. I know better programming
algorithms would speed this up significantly, but I have not had time
to fix that. PIC18 family programming algorithm is significantly
faster.
The burning options are:
--erase
To be able to reprogram a PIC device that has previously been
programmed into Code Protection state (for example in pic16c84 Control
Word fuse bit 0x10 cleared), it is necessary to bulk erase the chip.
Also some PIC devices do not automatically erase each location as they
are programmed, and these devices must always be bulk erased first.
It is done by adding this option to the command line. The default is
not to bulk erase the chip.
--burn
Actually program the device. Without this option only the syntax
of input files and command line options is checked.
--input-hexfile path , -i path
Specifies the input hex file. The file can be either in IHX32,
IHX16, or IHX8M formats, the format is automatically recognized.
--cc-hexfile path , -c path
Only necessary for debugging. Outputs the same data as was read
from the input hex file.
--force-calibration
Force reprogramming the OSCCAL word and BG bits in control word.
Default is to read the calibration values off the chip before erasing
and preserving their values. Use this option if you have accidentally
erased the values on chip, and you reprogram them from your saved copy
which was read off the chip before the values were lost there. In
general it is a really good idea to first read the empty chip and save
the file somewhere if the calibration data gets lost later, either by
accident or because of some bug in Picprog.
--pic-serial-port device , -p device
The device name of the serial port the programmer is connected
to. Default is /dev/ttyS0.
Environment variable PIC_PORT can be also used to specify
the serial port. Use /dev/ttyUSB0 in Linux or
/dev/ttyS13 in Windows/Cygwin for USB serial adapters.
--device chipname , -d chipname
The chip type. Environment variable PIC_DEVICE
can also be used to specify device. Currently supported by code are:
I do not know if all the chips work or if any other than pic16c84,
pic12f675, pic16f676, pic16f76, pic16f88, pic16f876a, pic16f628,
pic18f1320, and pic18f458 work, these I have tested myself. Default
is to autodetect the device by reading configuration memory location
0x2006. If no device id is present, the default is
pic16c84. If reading location 0x2006 with 14 bit
programming algorithm fails, the PIC18 programming algorithm is used
to read configuration memory locations 0x3ffffe and 0x3fffff. To add
a new supported chip type, just edit the table in file
hexfile.cc.
The hex file addresses (in IHX16 format) used are the ones specified
by Microchip. This example is for pic16f628:
0x0000-0x07FF
Program memory, 2048 words * 14 bits.
0x2000-0x2003
ID locations.
0x2006
Device id (not present on older chips), not present in hex file
0x2007
Control word fuses
0x2100-0x217F
Data memory, 128 bytes * 8 bits.
The addresses in IHX32 and IHX8M files are not word addresses but byte
addresses. Divide those addresses by 2 and you get the same addresses
as in the example above.
This example is for pic18f1320. These addresses are byte addresses.
IHX32 is the only option for saving PIC18 family programs in hex
files.
0x000000-0x001fff
Program memory, 8192 bytes of 8 bits, or 4096 words of 16 bits.
0x200000-0x200007
ID locations.
0x3ffffe-0x3fffff
Device id, not present in hex file
0x300000-0x30000d
Control word fuses
0xf00000-0xf000ff
Data memory, 256 bytes * 8 bits.
Before interfacing with the PIC chip, Picprog calibrates its delay
loops by checking the clock speed of the CPU and whether the CPU
supports the TSC feature. On Linux, /proc/cpuinfo is read. On
Windows/Cygwin, /proc/cpuinfo is read and CPU clock frequency is
estimated. Therefore the clock frequency displayed on Windows is not
necessarily exactly the true clock frequency.
Long cables, different values on capacitors and resistors, and
differences on sertial ports can cause very long signal rise and fall
times. The JDM device is sensitive to that, and mostly is designed to
be connected directly to computer or with very short cable. The
sensitivity also depends on the PIC chip type. It may help to stretch
the delays in Picprog to allow for longer signal settling times.
Larger delays are needed also for the uJDM
programmer device . A couple of options are available. They can
be tried individually and together:
--rdtsc
Uses the CPU's TSC capability, cycle counter, to measure time delays.
This is the most accurate way of measuring time, and gives you the
fastest programming. If you are running as root, interrupts are
disabled during the time the clock pulse is down, and this may help if
the chip looses power during too long delays. However, this option
may not work with all CPU's, laptops, and other variable clock rate
computers.
--nordtsc
Ignores the CPU's TSC capability. Try this if the programmer does not
work. This is the default setting now. It is a bit slower than
--rdtsc, but works more reliably on some computers.
--slow
Slow down the bit transmit delay loops to 10 microseconds. Try this
if the programmer does not work without it.
--reboot
Before programming, try to switch of the microcontroller power. This
works mainly on JDM type programmers, and may help on some chips with
internal clock generator that otherwise would continue running the
program.
--k8048
Invert the signals on the serial port to and from the programmer
hardware. This is necessary for Velleman K8048 device.
--jdm
JDM style signaling on serial port. This is the default.
Old patches to solve the timing problem were made available by Werner Almesberger:
picprog-1.7-werner-almesberger.diff ,
and by Matthijs Kooijman:
picprog-slow-test.diff .
Simple instructions:
Insert the PIC chip into the socket in the
programmer, or connect the in-circuit programming cable to your
device.
Connect the programmer device to a serial port.
Read the device with command:
picprog --output ofile.hex --pic /dev/ttyS1
The reading options are:
--output-hexfile path , -o path
Specifies the output hex file. The file will be written in IHX16
format, unless otherwise specified by the --ihx8m or
--ihx32 options. For PIC18 family devices, file will
be written in IHX32 format.
--skip-ones
When reading the PIC device, do not consider the all-ones memory
locations to be programmed, and skip them in the hex file output. For
14 bit devices, this skips the program memory locations that have hex
value 0x3FFF, and for PIC18 family devices, this skips byte values
0xFF. In data memory locations that have hex value 0xFF are skipped.
--ihx32, --ihx16, --ihx8m
Select the output hex file format to be either ihx16 or ihx8m,
respectively. The default is ihx32 for PIC18 family devices and ihx16
for others.
--pic-serial-port device , -p device
The device name of the serial port the programmer is connected
to. Default is /dev/ttyS0.
Exit values are as defined in <sysexits.h>:
EX_OK, 0
no error
EX_USAGE, 64
command line option syntax error
EX_IOERR, 74
file or serial port io error, or after-programming verification failed
EX_DATAERR, 65
input file syntax error, not in IHX8M, IHX16, or IHX32 format
EX_NOINPUT, 66
unable to find input file or file open failed
EX_UNAVAILABLE, 69
user or signal interrupted programming
EX_PROTOCOL, 76
the device is unknown to the programmer
Source files and their contents:
picport.cc, .h
class picport: manipulates the serial port hardware. With this
class you can execute programming commands like read a word, program a
word, increment address etc. Look at picport.h for details.
hexfile.cc, .h
class hexfile: contains a PIC memory image. You can load and
save the contents of this class to a file, and you can program and
read it from the PIC chip. Programming uses class picport.
program.cc, h
class program: just some generic option handling.
main.cc
Just the main () to parse command line and call class hexfile to
do its job.
This document has not changed much since it was first released with
the 1.0 programmer. The changes include some information about new
software and more accurate links to PIC information. New options
to select type of device other than pic18c84 are also present.
2003-08-10 version 1.2
2003-08-21 version 1.3
--erase now works also without
--input-hexfile flag.
2004-01-02 version 1.4
--force-calibration to program OSCCAL and BG
bits. Implement programming algorithms for 16f87/16f88 and 16f87Xa.
Revise some timings on programmer reset to avoid operating voltage to
dip. More verbose output on how many locations actually were burned.
2004-03-02 version 1.5
2004-03-19 version 1.6
2004-04-28 version 1.7
2006-03-05 version 1.8
Jan Wagemakers from Belgium.
2006-03-26 version 1.8.1
Jan Wagemakers for the fix.
2006-09-28 version 1.8.3
2008-06-05 version 1.9.0
--reboot option, thank you
for the idea to Mauro Giachero. Some code changes remove duplicate
port initialization. Timings have been changed completely, hopefully
this fixes the erratic behaviour with some chips. Thank you for
testing and ideas to Mauro Giachero and Jan Wagemakers. Added
environment variables PIC_PORT and
PIC_DEVICE, thanks to monttyle. Added --k8048 option for
Velleman K8048 with reversed signals, thanks to Bob Dunlop and Neil
Turton.
2010-04-14 version 1.9.1
PiKdev
PiKdev is a simple graphic IDE for the development of PIC-based
applications. PiKdev is developed in C++ under Linux and is based on
the KDE environment. It includes a programming engine which allows
programming various flavors of PIC microcontrollers via classic (ie:
D. Tait or JDM compatible) programming hardware connected to the
parallel port or to the serial port.
PP06
Linux and Windows programming software that knows about 83 pic's
and 6 programmers.
XWisp
Programmer software written in Python by Wouter van Ooijen.
serp-0.5
(serp-0.5.tgz )
A serial port programmer software for Linux, written in c++,
author Ralph Metzler . It
directly handles the serial hardware, standard 16450/16550 compatible
uarts, and needs root priviledges for that. Unmaintained since 1996.
jdm84v23 (jdm84v23.zip , pgm84v23.zip )
A serial port programmer, schema
(gif) and DOS software. The hardware manages with rs-232
interfaces with low voltage output, even as low as ±7V is fine.
This is the programmer I use with linux with my own software.
I modified the circuit to include connections to pins that are
needed for programming some PIC microcontrollers.
There is a new version of the PCB available on Jens Madsen site. It
supports more chips without jumper wires: PIC-Programmer 2 .
uJDM
A serial port programmer, stripped down version of the JDM device.
Works with Picprog but needs option --slow and possibly needs even
more patching for other added delays. See picprog-1.7-werner-almesberger.diff
for some advice.
pip-02 /com84 (pip-02.zip )
A serial port programmer, schema (gif)
and DOS software. Needs +12V rs-232 positive voltage level.
prog84-3
A parallel and serial port programmer, and software for Linux and
dos, written by Wim
Lewis and Frank
Damgaard . There is some experimental code for an USB parallel
port device.
dvtait84 , pic84faq
(dvtait84.zip , pic84faq.zip )
A parallel port programmer, schema
(ascii) and DOS software with basic and turbo-C sources included.
Author David
Tait . He has a lot more stuff, and some new designs to program
other PICs in his links page.
mjcox84 (mjcox84.zip )
A parallel port programmer, no schema, written in assembler for
DOS with 486/33 timings. Very limited. Author: Mark J Cox, m.j.cox@bradford.ac.uk .
ngoodw84
(ngoodw84.zip )
A parallel port programmer and disassembler, no schema, seems to
use pins DATA1 = data and DATA2 = clock and needs external programming
voltage. From Everyday Practical Electronics, February 1996, author
Derren Crome. Disassembler by Nigel Goodwin nigelg@lpilsley.demon.co.uk .
Minimized
PIC16C84 Programmer
Parallel port programmer, DOS software, needs external 13V power
source. Author Stephen M. Nolan.
GNU PIC Utilities
gputils have assembler, linker, disassembler and library utilities
much like MPASM. They support all PICs.
SDCC - Small Device C Compiler
SDCC is a retargettable, optimizing ANSI - C compiler.
Yappa
A graphical development environment for PIC16F84 by Mark
Colclough at the University of Birmingham. Yappa combines into a
single application the editor, assembler and programmer interface that
are needed to program a PIC. Picprog is used as the programmer
backend.
picasm112b
(picasm112b.tar.gz )
Assembler in ANSI-C by Timo
Rossi . Outputs both IHX16 and IHX8M. You can
also find disassemblers for 12 bit and 14 bit PIC's on Timo's site.
asm_c84
(asm_c84.zip )
Assembler in ANSI-C by James Cleverdon, jamesc@sequent.com . No INCLUDE,
no IF, outputs IHX8M. The
manual.
SIL
I have heard of free SIL language (something like Pascal/M2)
compiler for PIC.
JAL
Just Another Language , a
Pascal like high level language. "... I wanted a HLL which is better
mached to the PIC architecture, to my programming habits, and which I
could explain to the kids of the local electronics club without giving
a full course on computer architecture."
HI-TECH Software C compiler
A demo is available of their compiler.
elabtronics
CoreChart
CoreChart (formerly named bitset) is an icon-based development
tool. 30-day trial available.
GPSIM
PIC simulator.
Picprog was first written and released in May 1997. Around that
time I briefly experimented with microcontrollers. I found no Linux
software for the cheap serial programmer hardware by Jens Madsen, and
I wanted to use that one as it was so simple to build. Only later did
I learn about serp-0.5. Anyway, that one directly programmed PC style
serial port hardware while I wanted to use standard UNIX methods of
accessing serial ports. Linux was missing an IOCTL to force BREAK
condition (steady +12V) on the serial data transmit line. This kind
of functionality existed for example in Solaris. No problem, I
created a patch for Linux kernel versions 2.0.30 and 2.1.42, submitted
it, and it was included in mainline kernel versions 2.0.32 and
2.1.45.
Since the time I first wrote the software I did not work with
microcontrollers at all for years, though I maintained Picprog by
fixing obvious compilation problems and updating documentation.
Version 1.0.1 was put together in May 2001 and included mainly
documentation fixes. In June 1997 I had worked on adding support for
different memory sizes of different PIC chips, and these changes and
again documentation updates were released as version 1.1 in February
2002. I also found the programmer hardware I thought I lost a few
years back, and was able test that it still works.
Picprog-1.0 was ported to FreeBSD and included in the distribution
around September 1999. MIT
MASLab 6.186 , a student-run robotics course, seems to have used it
since January 2001. Recently this documentation page has attracted
steadily over 1000 visits per month, so I guess someone is finding
it useful.
Nowadays I mostly test Picprog with new chips, and sometimes I start a
new project like KanSat
satellite or 8-PIN
PONG , and never finish them..
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see
http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi http://www.iki.fi/hyvatti/
Please send any suggestions, bug reports, success stories etc. to the
Email address above. To avoid my spam filters, please put the word
'picprog' somewhere on the subject line.
Jaakko Hyvätti /Jaakko.Hyvatti@iki.fi /+358 40 5011222
������������������������������������������������������picprog-1.9.1/anybrowser3.png�����������������������������������������������������������������������0000644�0000765�0000765�00000001565�07720425101�014613� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������PNG
�
���
IHDR���X���������T������`PLTE����ff�33������̙��ff���fff333��3"�����������wwwUUUDDD"""���������������������������������������{�������bKGD����H����IDATx�Օ�r� ��s����@����v�/�&f�L2��L|9��c�����s�?�������X$�r͐���٘)�OD���X��] ����n�s�s&�G��&ͥ�T������L�^�I|�|�#����^�\��"�8W��ع!̅z�,<�(@M���1��R�"\�ٰR��_�葇1�B�jf!=�ZS�V�B֬�!�nRS�Q)�����VVd��u�0���������;C�q+(>�����騥R-a�
\� ��LRG��W��v#��(|��q�Lc"�ʡ �Y��ܬ�]`3�h�Ӣy��p$�|�ŭ�}��,���������A�O�-�$����OC��=�c��lΟ�^�[J�* ��
�e0��xO����+[�I<�T����Բ�\����&
��0sf���������5�m��c�k���q\��w,�^Jx��-��AW����������.�[���In� 睛a����c�Q�=�s#�����T�8T�{ڶ;8�)N���)g��|�ǹ1\�}IJ!]W���������2��E�Q���y��P�
����=I��������qw���|n���x��(] �����
�g3��PM������O+����eV]��=pr8|dϱ�C�����k+ގ�8^w��|!B��U�O7Ew!P��0o)����Gږ��+����.�>���`��0���������
����O��e"`���%tEXtComment�clip2gif v.0.6 by Yves Piguet6s;�����IEND�B`��������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/jdm84ne3.png��������������������������������������������������������������������������0000644�0000765�0000765�00000010634�10020745744�013673� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������PNG
�
���
IHDR�������������P�������PLTE������������������������^�s,����bKGD����H��� pHYs����������#�u����tIME�����03�<���
IDATx��]
z�
��;��^��^ mz�����gj�B����0C&~��Ɍ��B ��Jݸq�ƍ�7nܸq�ƍ�7���s<��=! �Ǘ�a��~Iи�����������u����~����%��|���̦ P��W����?)_�)��=���S���������w��;����&|mu�e��o�kv�j(�%d���g�|�/F]%���ӡ�:�j�����7g|���c�w�uz����V��0�����"_��,�
U�t��}��>�2a�{`o���Z2�_[�&�Y(���ejH�s���^���������d��G�1v��Z�<_0M�����1���i~��]�
�wƛJ�E����C�����%މ�a2��юo|w��c�6�6w���R�:�-��M��r!&�{ɞ<�|���{\���˷Ͻ-�y��9⁗�/�cg{cv�Ğ���Q��aslj���Is��_�`G���@�����S�ϱ��n���5�,_rAQ�Ύ�G�Kc�g�
I�s,�f��AQ�{�����4�[|�&��iА�S���e��:ȱ��3��ǚdUj�)_�����ƾ�����!���Z?Id���G.�������HӠ�^�㦛s��/���*��|1�%�K&�Dm�7T���Z����9��?3x�
��R�M0�>+�L�����u@��b���e?���
|�g�A�����S�K;�f����lW��⥟U8�1�`��a�{9�H��8��PT�3�3C��lƠ��&�5���u���7�>�_'^����Ys����|��Xs�k=��]�T|}��D�_���\�Z���S
��H��ն��j�%�w%�A���,��3��?���|��_������ay&���������g���~
N��|}2���D|mE^W��j����J�s��{ 8��q��M��L����U�)�^�����>o��F{�'3}��%�����t`.������)�=���}�ʐ��
�ɬ�F{�M�������}>����W�_ʗ�o;���gp��{2�ў��`?o���}{{�?���,�9��`O����I�|Ӥ����I�/ؓ.��E�¤'�YEx������iғ�����[��������&=)_���m�0���(~��
��ء��utE�K�7ؓ4�.�=Ȋ�o�wI��Q���2p'��K�ɷ݆�{�/�d|-�?�d|��>��wc�����ېh���s��֥����ܛ�o��+�o3_2�쏋�s\�0���(���I�ķ&�C�f��o���A����T|k2h�kf���[�f�e��Iw��?:
����^����LΞ�hv\��ۓk��s��'M�%Tǡ�)_f�������k�R������#8<�xP�:Z;����[G���tg?��G�oQ���$X��P��q�����S@�@�i��%_M�b��ؓN�[�g�|
R`iu����o��v�&�/ܒؓ���-:�����a(b�o�����Y�>q���^�����cj���íS�+n�|e|������؞�j^�^�����)�Q��=uh�[�Au�볅��M�X���
�ݮ�
G$��!��{>_\h���,nj�_C�K����3���ow`��r'���sT���]U�o)����a\3p�>_��:�-:��>ͽ��@��9�۰և]/dWҸ�3��bg�m*|Ҵ��E-��~v|qu�]Hb�j����?���>>���F5�o��l��n��/�j
������3�����R��}�Z��0rEm�+hms���0����u����������
�&����X��dN������o�&N����+���3�u�o?a�����bK~g��ݝ@�
�2�(��"_/����v�O��+��|qE\q�I��#��� �=����N�:��q���N���y|}�|,`��&n���!j�G��+�ũ����h�_J�����Y�[��u��+ߏ���|��cp����j��V�P�3��w���AT�d"0a�>�/Mz f��p��-?^�CD�b�1ag�ٝ���M�)������gt�d|�.�WY��''��+��Z�w������(��pZ�����7�'�/�D��0Rg�ɒ�7����w���7�Ҙ��� ��GE���_K+Et�s����P�<���X�|K�������Z��gC��X�����҃l���`|,�>T�7�/���o���a��|T����|a�Vf���N�O
������β�4��b<���
�Q�˳��I�����χ�
��g��I��=\j��`O��2l��kU��|����ؓ��_�'�5�����3t�LX����T�/$��3<�o�~�V:�ړ���%��D���nR�������=��/ؓ�:��#�x�_G�����s��~��ɗ�OF�@���7�LJ���K�ƒ�/'�_s�W�|7���~Ko��.��2�k�rg~�=Y�_�*�
�Y�Q���c�u��1-�H�� _2�t ic����|?|�S��^���ٓ|�y��eb�x� E��M'��n?�z�8�IE ��u��Q�e��eb��+���u����W���.�M��
��K���&|�����$�����{2����X��G����=��E{�z�����|��[������� ��\{�*/�f�ۻFOϷs���og�O����w���B�ft8�,���u��>�ۻ�n����6���k�MϷ
>���>��/���,��G���ڶ���7��/�^�{�$[�-~&_�B������;�u�k��� ��
�u�AR��W�U����4����ߊ$����=f���&K�d�<�/�4�����'� ��-竂C�L����AUn�Ÿ�x(|�T�n��=���|��5�jv�n�a�)�����4WZ�'������+���%���M*��l��_&��{�7�7b��x�(���C�ש���E��%�Q������F������do��o�&�˄�D�ȥ�y�Z�6�|u$�
����ٓ��K2`�#��^���@/�-f >9$�a�s9���!��|��9�O����|?�g!�Θ������F�����.?���j��x:��&�]����Fj0ߥ�o_�����`��A���g���?I���v��|��Ej,ߥ�/ТnI�[b]��N>�MR�9���� �B�z�v���:H�F����6��L��6�amp����3����7��J��kyn�_+�]X������n�@6u���
��a{m�+���D�"_�dž��P�az��/y}���7R�&���S"�������V,z�!_�A�>����/�o���|��W�vaE���i�q������yq�2���]Z�� ���{cQ~ZG?�/�w�"�~�X�A@h��h���o3��ٙ���.���gb��� �j�o�Ӟ�9����w��o��7aR�|%7��q;�M�T�_1\ڮL��������sȼ�7��
_;�V�ZEh���?����w���R�� _��В����*^�[��^w�������L�u�ߥ�2���Y+G�/-���i�̦eʩ��y7�#곘/1S�����fӼS �5R�z\��T��]wE�do�F��]���LL�cr������7C�/�A%~*�`��F+nW��(_nՐ��-��|]��&Ҕ��E���g�-��<��M�$K(�����Ң�A��6�i���@���>gO~�~��`���?���1��P�,�(m�F��W�H��>g�ޢ_�W�@O|P����%�:v�!m��#M�_$H�2����g�7r�R��%/��!m�D����QB>۞�gKi��fo�����|~,2���I�䑦W���`U�7��$��u�(���A�f��V��7X=��'7������Z��~����;Dė�`��_��(���7ڮȿn�i��b�ȭ��P������v�J��Qk_՛(G�|�
V�|�7�.�+`U��x�=iQɷ*�sT���#�M��͗�ͷ_���f�l¤n�,n���>��7�d�&u�e���6-ɸ�6��j�b��8�o����=�f��_�������_�����_�������|�;�*����ˊ$�t��f ��Y�W���Gy4�t�
�$]��J�~���}S�������|���R�^�\W��+,���k��q�ƍ�7nܘ����-�'��������IEND�B`�����������������������������������������������������������������������������������������������������picprog-1.9.1/jdm84pcb6.png�������������������������������������������������������������������������0000644�0000765�0000765�00000010263�10020772546�014036� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������PNG
�
���
IHDR�������|�����w,������bKGD����#2��� pHYs���������d_�����tIME�����-:Mp�����DIDATx���v�&��-�����^�j�9�1��$�ܴ�'���B���]7��
4�4����
����40�F���?���h`�
����40��������@��h`�
����40����>�����������$�"����@��h`�
����40��������@��h`�
���2 /?������;�w����q���Yq��9����
�vp��`�p��o������A~�C�t@@�����[�o� ������8
�j���Qy�s�?�n��;+��P��2;G�YP��ͿEC��P�T��j%�+�������D^�FEѥx��{C��kW���������!(����E��� E��|N����H`�w �����������0�8��*9�[i7~2��P�)>��ZQ`��D���:d�|"����u(���Y�����"���aq���������ć����?�����(�������Hװ�Fuo*��a����f�?�����Y�������Lv��wTw��f4�/���H�#��M��n>zw������r���v�$� S"����ָ��Z����������-�q�%��?*�u�[�ė
�.
�[ؐ��k����ի)��u0�g�G�7撘O��~o*nּY���;10���eVԺ[��g{Tm��f�����
�-��Q�������Đ�����S(d�0��$n�|!0��I���Ϻ�����9������6�B�:�<:`��Q@�ol�����}��酲�g��z�C�L���5�����[6��?���@V���7� �^�A�8Ȧ���ȗ�H��br�q�l��_��>���@<����]����]��!pJ��1`���}��ݲ���^�R+��v_�d�yX�����������C�@�x���]_j���lN����v�}{B�O�2����i�G��/�����L�Gm�]�����M������������O�ۣh�������z��L��B�9�������it�2oyQ$` �/l�C�@�x������' �CӋP�[��kyAb�I��tg��ض�~���!��`'��@
�� �����~Ig9
��z�dʡ+�$����A�!WA�lH������@�d'���������xO�h�����S4SG�������G��"
�@�{"0|��[����M�²;��)�z���h{����!��������h{����!���h�;�w���f��j�8g�Kw�Fw���8|�C<&Hc��K4&!���r�{����o��J��&�����:��'���o��*�\'���xNؓ�S�t����wh�Ϧ����'����T���"/����e���^
� h[^~t��._y���E�-��@8��ht��G�_/���� p]䄀����q��Q�F|�����j��[6�@�;�:z� k��U���Y���o0�A�roHn�L�� �����@0�+�8
l� ���� �����Gw���}���W��i�8��_�-�3Jr��w��Xy�u�tm��2�� 4��UG��J]��r��>��������*]�~5���h�*��Q��>ړ�����ܙ���h�*1�z��i5�Ɓ㗃�"��������E�X\wx
�9�q��QX����|���jO���8��;1��הJ7β�rЬOާ,�9��+�|@��0���A��x�����rBqB��r�����ѣ.�����&�
˖�Ծ��fʅ������B&}����;]�7M����~UV��IW�9a������7�J��r ������0���Z���F;���DX�9ā��w�;��1@``Ů���ƀ_��!����a���� K9�]��n-�$�\��r�FU�j��]�b7���������!�TD`}�㗪ĵ�e����z��Hp�ZpJ-�� ` p<�\��$�����S1
$�w������C�8g!��ƀ���!�g�@�³��.�k��ӟ���ώ�F��g���8��Y��C�xv��r�u���q��de�xv���i��>�<;N��Q@�{�T��B��"�0�P��� ` �[�6����2������c�'�w��)���;�F���`Cݱ;���-��~�������k#���1�l��n߬�B`Lw|�o�'�\<�|�������;D�F�0��P�����C�@�x�>9O㫳��۔_|W��.��rM�^���+YSw�f$�z���d,�%���@M�� �
u�臠�;\��O:����r��
*8�K��
�uZ�H�@�x�������A ��X���S'
T����C.�@@���R$` p��ׇ���}��U��C�@�O����2�|R#@����Oo^^��Jb�[!�s�M��*� x+����l��g/��"��A������o���EF�[�m"�G�i�;��������"����0d�H0�������:xf˨��������,����Q&�v�h�� ]}��^�p�������Gb���0���#��U���;��/����v$vk�>{�)��^#uȹ�'��K������Hu���x���g$�!'u$�*Q dw0����T��n���W�:���o���ŭ�D�|���V������,���jg��5��]�<�!+/�Q�U ����ei�=�&�,zf��XY�^�I����%�&6�kO������U�J�����3z�2�6��r�������m����f���������!t�]�A��q�H���8��A������A��c���d�cy���
��=�c��f�p̐����z�2��N�pȐ�$
��;�q�6j���
�����`�&��I[A ����-�y�����L�'��%�@1��v�V��Q����cT�0���g����������뎧��8���jϨ���G�f$��|���������g��l0�����~)�c��Q�2�;첫JL�#�������ߌ���䟜��rY۲FgM��~3R3��$�U%V|�JeY��&�Q�������{�7t����KN��[����&���g����Q��8����l��
�U ���鎿��_G�"��ė��UG/__Y�G�UU�/7˫�^ξ2��hxhh�����d�Xwlԯ�^M�c��ʣ;v[wF���|-�:�*Q��5������0����Ԏ������{
�b�+���#
�?H3ݱ�:�A�
��̌�ƪ�����Jw���l��<�33����W�j�=�2�������;�����ǩ���`�:����}{K�l-?�-��}��7�#���:�<�8�+�0��= K���d���s1=fz�
F������/�D
����d p� ���?ȅ�c�~5�Ռ�Dw|�K���Fw�OK;�l�Z�����*#�q:-����պ����Jw�MK�E�
�)_�',f��dZڗ&n�G�1Qg�f������R��C�|������ǘ5��`��Ni�(��I�N���������/Ͱ�1
����r�L���:����zǗ[��,��c��ZP��!�����ݱ�;�Y���;"`�;��_�뎝����uw�;�D�k�������`��\���,;莽��儱M��\���;��ˢ�������R��X�l�X��=���;������������z��/��@1f�����}�HS�v�)>Gc��R��m��I���-D G�c�����w����r����˵� D`��8�W������X�;N���*��e����,� ��U����Ќ���`��=;�,v;3w�c��:�kt������e������+���;s��A<�+�X��$�`����X�#H
�
�,u������ɾ����-�L�����2ݱ�����Ö���q��zf$>�O�����,b`-��!�F`i�c������X�����w<8
[ݱ�Yv� ��X��I�/�'u��������2��@��V�'�QQ�\���g�����N�����t�X��!�;���������Z�L��D�f �����;V�a��
$W��,�w��2 �Y���F������,g��dB@�;���6�I�e�;���2���c P����1�(������TC���q�:x������k�2ү��r���̲��}�����t�X�R0���9�����L<;�����Je���'\!��-�Vs�����c���tνu��0���J��kޫ&����X�;�E�z����*'��,Y��+#&��DcY�
Zv����A������ ����T�zǷ����k��E�Fw�(P|-�h���_��˚��IjC����F��~5�5��sԆ^�;�_����X�T4NQ�zVsJN#�����i,��Vs4����k�g�hQ�pʓ�����ާ���b���he���h3ZT��!���`�.��p������\����0���������`�.��p������\����0���������`�.��p������\����0������
�����䀇��������IEND�B`����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/picprog.1�����������������������������������������������������������������������������0000644�0000765�0000765�00000001613�10716121664�013354� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������.\" Copyright \[co] 2007 Jaakko Hyv\[:a]tti
.TH PICPROG 1 "picprog 1.9" "29 Oct 2007"
.SH NAME
picprog \- Microchip PIC programmer for the serial port device
.SH SYNOPSIS
.B picprog
.B \-\-quiet
.B \-\-warranty
.B \-\-copying
.B \-\-help
.B \-\-device
.I chiptype
.B \-d
.I chiptype
.B \-\-pic\-serial\-port
.I device
.B \-p
.I device
.B \-\-input\-hexfile
.I path
.B \-i
.I path
.B \-\-output\-hexfile
.I path
.B \-o
.I path
.B \-\-ihx32
.B \-\-ihx16
.B \-\-ihx8m
.B \-\-cc\-hexfile
.I path
.B \-c
.I path
.B \-\-skip\-ones
.B \-\-erase
.B \-\-burn
.B \-\-force\-calibration
.B \-\-nordtsc
.B \-\-rdtsc
.B \-\-slow
.B \-\-reboot
.B \-q \-h \-?
.SH ENVIRONMENT
.B PIC_DEVICE
.B PIC_PORT
.SH DESCRIPTION
See .
.SH OPTIONS
See .
.SH AUTHOR
Jaakko Hyv\[:a]tti
.LP
Jaakko.Hyvatti@iki.fi, http://www.iki.fi/hyvatti/
���������������������������������������������������������������������������������������������������������������������picprog-1.9.1/hexfile.h�����������������������������������������������������������������������������0000644�0000765�0000765�00000010316�11361213314�013413� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/* -*- c++ -*-
This is Picprog, Microchip PIC programmer software for the serial port device.
Copyright © 1997,2002,2003,2004,2006,2008,2010 Jaakko Hyvätti
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Phone: +358 40 5011222
Please send any suggestions, bug reports, success stories etc. to the
Email address above. Include word 'picprog' in the subject line to
make sure your email passes my spam filtering.
*/
/*
Hexfile follows the Microchip hex file format for pic16c84:
- program memory at locations 0-0x3ff
- id at locations 0x2000-0x2003
- fuses at location 0x2007
- data memory at locations 0x2100-0x213f
*/
#ifndef H_HEXFILE
#define H_HEXFILE
#include
using namespace std;
#include "picport.h"
class hexfile {
// pic16 family: program size is counted in words.
// pic18 family: program memory size is counted in bytes.
short *pgm;
short *data;
short conf [16];
short ids [8];
// Return code used in program_location () to indicate that the
// location already was programmed to specified value.
static const int NOT_PROGRAMMED = -3;
void reset_code_protection (picport& pic);
int program_location (picport& pic, unsigned long addr, short word, bool isdata) const;
bool verify18 (picport& pic, const short *pgmp, unsigned long addr, unsigned long len, unsigned long panel_size, bool verbose) const;
int program18 (picport& pic, const short *pgmp, unsigned long addr, unsigned long len, unsigned long panel_size) const;
public:
enum formats { unknown, ihx8m, ihx16, ihx32 };
enum memtypes { flash, flash2, flash3, flash4, flash5,
flash18,
flash30,
eeprom, eprom, eprom18, prom, rom};
private:
int dev;
int addr_max; // Used in inc_addr command for 12f only
void save_line (ofstream& f, const short *pgmp, unsigned long begin, unsigned long len, enum formats format) const;
int save_region (ofstream& f, const short *pgmp, unsigned long addr0, unsigned long len0, enum formats format, bool skip_ones, unsigned long &addr32) const;
int read_code (picport &pic, short *pgmp, unsigned long addr, unsigned long len);
struct devinf {
const char *name;
unsigned long prog_size;
// How many words are reserved at the end of program memory
// for for example oscillator calibration?
unsigned long prog_preserved;
// Bits that must be preserved of configuration word 0x2007.
int config_mask;
unsigned conf_size;
// Either 12 or 14 for now. Only 14 bit devices tested
int prog_bits;
// Original 18f parts used multipanel writes. 0 disables this.
int panel_size;
// How many bytes/words to write at one programming command (18f).
// 0 means unknown for 14 bit series, 1 byte writes work.
// In the future maybe for 14 bit series multiword programming
// will also be implemented. In that case, fill this field
// for them too.
int write_size;
enum memtypes prog_type;
unsigned data_size;
enum memtypes data_type;
// Device id stored at 0x2006. -1==no id on this device.
int device_id;
};
static const struct devinf deviceinfo [];
public:
hexfile () : pgm(0), data(0), dev(-1), addr_max(0) {};
~hexfile () {
if (pgm)
delete [] pgm;
if (data)
delete [] data;
}
int setdevice (picport &pic, int& d);
int load (const char *name);
int save (const char *name, enum formats format, bool skip_ones) const;
int program (picport &pic, bool erase, bool nopreserve);
int read (picport &pic);
// statics
static int find_device (const char *name);
static void print_devices ();
};
#endif // H_HEXFILE
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/picport.h�����������������������������������������������������������������������������0000644�0000765�0000765�00000006066�11361213274�013463� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/* -*- c++ -*-
This is Picprog, Microchip PIC programmer software for the serial port device.
Copyright © 1997,2002,2003,2004,2008,2010 Jaakko Hyvätti
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Phone: +358 40 5011222
Please send any suggestions, bug reports, success stories etc. to the
Email address above. Include word 'picprog' in the subject line to
make sure your email passes my spam filtering.
*/
#ifndef H_PICPORT
#define H_PICPORT
#include
#include
#include
class picport {
public:
enum hardware_types {
jdm, k8048
};
private:
int fd;
struct termios saved, termstate;
unsigned long addr;
int debug_on;
enum hardware_types hardware;
char *portname;
int W[16];
int modembits;
void set_clock_data (int rts, int dtr);
void set_vpp (int vpp);
void p_out (int b);
int p_in ();
#if defined(__x86_64__) || defined(__i386__)
#define RDTSC_WORKS
#endif
// How many tsc clocks (cpu clock cycles) per 1000 ns
static unsigned int tsc_1000ns;
static int cable_delay;
static int use_nanosleep;
public:
static void delay (long ns);
enum commands {
load_conf = 0, data_for_prog = 2, data_from_prog = 4,
inc_addr = 6, beg_prog = 010, data_for_data = 3,
data_from_data = 5, erase_prog = 011, erase_data = 013,
command1 = 1, command7 = 7, end_prog = 016,
end_prog_only = 027, beg_prog_only = 030, chip_erase = 037
};
enum commands18 {
instr = 000,
shift_out = 002,
tread = 010,
tread_inc = 011,
tread_dec = 012,
inc_tread = 013,
twrite = 014,
twrite_inc2 = 015,
twrite_dec2 = 016,
twrite_prog = 017,
// flag for command18() method to implement programming delay by
// holding fourth command clock cycle up.
nop_prog = 0100,
// Flag for erase delay
nop_erase = 0200,
};
enum commands30 {
SIX = 0,
REGOUT = 1,
};
picport (const char *tty, bool nordtsc, bool slow, bool reboot,
enum hardware_types h);
~picport ();
int command (enum commands comm, int data = 0);
int command18 (enum commands18 comm, int data = 0);
int command30 (enum commands30 comm, int data = 0);
void setaddress (unsigned long a);
void setaddress30 (unsigned long a);
unsigned long address () { return addr; }
void force ();
void reset (unsigned long reset_address);
const char *port () { return portname; }
void debug (int d) { debug_on = d; }
};
#endif // H_PICPORT
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/program.h�����������������������������������������������������������������������������0000644�0000765�0000765�00000002555�11361213250�013443� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/* -*- c++ -*-
This is a generic program misc functions class v1.0.
Copyright � 1997,2002,2003,2004,2010 Jaakko Hyv�tti
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Phone: +358 40 5011222
Please send any suggestions, bug reports, success stories etc. to the
Email address above. Include word 'picprog' in the subject line to
make sure your email passes my spam filtering.
*/
#ifndef H_PROGRAM
#define H_PROGRAM
#include
class program {
static const char warranty_t [];
static const char copying_t [];
public:
char *name;
program ();
~program ();
void init (char *argv []);
void warranty ();
void copying ();
void usage (struct option *long_opts, char *short_opts);
};
#endif // H_PROGRAM
���������������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/hexfile.cc����������������������������������������������������������������������������0000644�0000765�0000765�00000214023�11361213467�013563� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/* -*- c++ -*-
This is Picprog, Microchip PIC programmer software for the serial port device.
Copyright © 1997,2002,2003,2004,2006,2008,2010 Jaakko Hyvätti
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Phone: +358 40 5011222
Please send any suggestions, bug reports, success stories etc. to the
Email address above. Include word 'picprog' in the subject line to
make sure your email passes my spam filtering.
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "hexfile.h"
using namespace std;
/*
The exact programmable memory type, prom/eprom/eeprom/flash, does
not affect the operations of the program. Therefore I have not
checked if every chip has the correct type specified.
If rom type is specified, this program only reads the memory and
does not atempt to burn it.
Structure fields:
- Name, used in command line option to select the device.
- Program memory size in words.
- Number of preserved words at the end of program memory, for example
oscillator calibration word. I have not checked all datasheets
for which devices have one, only some. Please check the datasheet
before you overwrite these configuration words! As a precaution,
please read them first off the chip and write down somewhere!
- configuration word preserved bits mask
- number of configuration words. 1 for 14 bit devices, 14 for PIC18
and 2 for 16f87 and 16f88.
- Word bit length. Only 14 bit and 16 bit (18f) ones supported.
- For 18f series, panel size. 0 means multipanel writes disabled.
- How many words or bytes to write at one command (18f)
- Program memory type.
- Non-volatile data memory size.
- Non-volatile data memory type.
- location 0x2006 or 0x3ffffe device id (-1 == device has no known id)
*/
const struct hexfile::devinf hexfile::deviceinfo [] = {
// 16x8x family
{"pic16c84", 1024, 0, 0, 1, 14, 0, 0, eeprom, 64, eeprom, -1}, // no OSCCAL
{"pic16cr83", 512, 0, 0, 1, 14, 0, 0, rom, 64, eeprom, -1},
{"pic16cr84", 1024, 0, 0, 1, 14, 0, 0, rom, 64, eeprom, -1},
{"pic16f83", 512, 0, 0, 1, 14, 0, 0, flash, 64, eeprom, -1},
{"pic16f84", 1024, 0, 0, 1, 14, 0, 0, flash, 64, eeprom, -1}, // no OSCCAL
{"pic16f84a", 1024, 0, 0, 1, 14, 0, 0, flash, 64, eeprom, 0x0560},
{"pic16f87", 4096, 0, 0, 2, 14, 0, 0, flash5, 256, eeprom, 0x0720},
{"pic16f88", 4096, 0, 0, 2, 14, 0, 0, flash5, 256, eeprom, 0x0760},
// 16c6x family
{"pic16c61", 1024, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1}, // ?
{"pic16c62", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c62a", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c62b", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c63", 4096, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c63a", 4096, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c64", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c64a", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c65", 4096, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c65a", 4096, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c65b", 4096, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c66", 8192, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c66a", 8192, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c67", 8192, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16cr62", 2048, 0, 0, 1, 14, 0, 0, rom, 0, rom, -1},
{"pic16cr63", 4096, 0, 0, 1, 14, 0, 0, rom, 0, rom, -1},
{"pic16cr64", 2048, 0, 0, 1, 14, 0, 0, rom, 0, rom, -1},
{"pic16cr65", 4096, 0, 0, 1, 14, 0, 0, rom, 0, rom, -1},
// 16c62x family
{"pic16c620", 512, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c620a", 512, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16cr620a", 512, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c621", 1024, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c621a", 1024, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c622", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c622a", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16f627", 1024, 0, 0, 1, 14, 0, 0, flash, 128, eeprom, 0x07a0}, // no OSCCAL
{"pic16f627a", 1024, 0, 0, 1, 14, 0, 0, flash4, 128, eeprom, 0x1040}, // no OSCCAL
{"pic16f628", 2048, 0, 0, 1, 14, 0, 0, flash, 128, eeprom, 0x07c0}, // no OSCCAL
{"pic16f628a", 2048, 0, 0, 1, 14, 0, 0, flash4, 128, eeprom, 0x1060}, // no OSCCAL
{"pic16f648a", 4096, 0, 0, 1, 14, 0, 0, flash4, 128, eeprom, 0x1100}, // no OSCCAL
// 16f88x family
{"pic16f883", 4096, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x2020},
{"pic16f884", 4096, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x2040},
{"pic16f886", 8192, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x2060},
{"pic16f887", 8192, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x2080},
// 16ce62x family
{"pic16ce623", 512, 0, 0, 1, 14, 0, 0, eprom, 128, eeprom, -1},
{"pic16ce624", 1024, 0, 0, 1, 14, 0, 0, eprom, 128, eeprom, -1},
{"pic16ce625", 2048, 0, 0, 1, 14, 0, 0, eprom, 128, eeprom, -1},
// 16c64x, 16c66x families
{"pic16c641", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c642", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c661", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c662", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
// 16c7x, 16c77x families
{"pic16c71", 1024, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c710", 512, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c711", 1024, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c712", 1024, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c715", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c716", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c717", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c72", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c72a", 2048, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16cr72", 2048, 0, 0, 1, 14, 0, 0, rom, 0, rom, -1},
{"pic16c73", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c73a", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c73b", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c74", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c74a", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c74b", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c76", 8192, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c77", 8192, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
// 16f7x family
{"pic16f72", 4096, 0, 0, 1, 14, 0, 0, flash2, 0, rom, 0x00a0},
{"pic16f73", 4096, 0, 0, 1, 14, 0, 0, flash2, 0, rom, 0x0600},
{"pic16f74", 4096, 0, 0, 1, 14, 0, 0, flash2, 0, rom, 0x0620},
{"pic16f76", 8192, 0, 0, 1, 14, 0, 0, flash2, 0, rom, 0x0640},
{"pic16f77", 8192, 0, 0, 1, 14, 0, 0, flash2, 0, rom, 0x0660},
// 16f7x7 family
{"pic16f737", 4096, 0, 0, 2, 14, 0, 0, flash2, 0, rom, 0x0ba0},
{"pic16f747", 4096, 0, 0, 2, 14, 0, 0, flash2, 0, rom, 0x0be0},
{"pic16f767", 8192, 0, 0, 2, 14, 0, 0, flash2, 0, rom, 0x0ea0},
{"pic16f777", 8192, 0, 0, 2, 14, 0, 0, flash2, 0, rom, 0x0de0},
// 16c43x family
{"pic16c432", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c433", 2048, 1, 0, 1, 14, 0, 0, prom, 0, rom, -1},
// 16c78x family
{"pic16c781", 1024, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c782", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
// 16c7x5 family
{"pic16c745", 8192, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic16c765", 8192, 0, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
// 16c77x family
{"pic16c770", 2048, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c771", 4096, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c773", 8192, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
{"pic16c774", 8192, 0, 0, 1, 14, 0, 0, prom, 0, rom, -1},
// 16f87x family
{"pic16f870", 2048, 0, 0, 1, 14, 0, 0, flash, 64, eeprom, 0x0d00},
{"pic16f871", 2048, 0, 0, 1, 14, 0, 0, flash, 64, eeprom, 0x0d20},
{"pic16f872", 2048, 0, 0, 1, 14, 0, 0, flash, 64, eeprom, 0x08e0},
{"pic16f873", 4096, 0, 0, 1, 14, 0, 0, flash, 128, eeprom, 0x0960},
{"pic16f873a", 4096, 0, 0, 1, 14, 0, 0, flash3, 128, eeprom, 0x0e40},
{"pic16f874", 4096, 0, 0, 1, 14, 0, 0, flash, 128, eeprom, 0x0920},
{"pic16f874a", 4096, 0, 0, 1, 14, 0, 0, flash3, 128, eeprom, 0x0e60},
{"pic16f876", 8192, 0, 0, 1, 14, 0, 0, flash, 256, eeprom, 0x09e0},
{"pic16f876a", 8192, 0, 0, 1, 14, 0, 0, flash3, 256, eeprom, 0x0e00},
{"pic16f877", 8192, 0, 0, 1, 14, 0, 0, flash, 256, eeprom, 0x09a0},
{"pic16f877a", 8192, 0, 0, 1, 14, 0, 0, flash3, 256, eeprom, 0x0e20},
{"pic16f785", 2048, 0, 0, 1, 14, 0, 0, flash4, 256, eeprom, 0x1200},
{"pic16hv785", 2048, 0, 0, 1, 14, 0, 0, flash4, 256, eeprom, 0x1220},
{"pic16f818", 1024, 0, 0, 1, 14, 0, 0, flash5, 128, eeprom, 0x04c0},
{"pic16f819", 2048, 0, 0, 1, 14, 0, 0, flash5, 128, eeprom, 0x04e0},
{"pic16c923", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, eprom, -1},
{"pic16c924", 4096, 0, 0, 1, 14, 0, 0, eprom, 0, eprom, -1},
{"pic16f630", 1024, 1, 0x3000, 1, 14, 0, 0, flash4, 128, eeprom, 0x10c0},
{"pic16f676", 1024, 1, 0x3000, 1, 14, 0, 0, flash4, 128, eeprom, 0x10e0},
// 12
{"pic12c508", 512, 1, 0, 1, 12, 0, 0, eprom, 0, rom, -1},
{"pic12c508a", 512, 1, 0, 1, 12, 0, 0, eprom, 0, rom, -1},
{"pic12f508", 512, 1, 0, 1, 12, 0, 0, flash2, 0, rom, -1},
{"pic12ce518", 512, 0, 0, 1, 12, 0, 0, eprom, 16, eeprom, -1},
{"pic12c509", 1024, 1, 0, 1, 12, 0, 0, eprom, 0, rom, -1},
{"pic12c509a", 1024, 0, 0, 1, 12, 0, 0, eprom, 0, rom, -1},
{"pic12f509", 1024, 1, 0, 1, 12, 0, 0, flash2, 0, rom, -1},
{"pic12ce519", 1024, 0, 0, 1, 12, 0, 0, eprom, 16, eeprom, -1},
{"pic12cr509a",1024, 0, 0, 1, 12, 0, 0, rom, 0, rom, -1},
{"pic12c671", 1024, 1, 0, 1, 14, 0, 0, eprom, 0, rom, 0x0500},
{"pic12c672", 2048, 1, 0, 1, 14, 0, 0, eprom, 0, rom, -1},
{"pic12ce673", 1024, 1, 0, 1, 14, 0, 0, eprom, 16, eeprom, -1},
{"pic12ce674", 2048, 1, 0, 1, 14, 0, 0, eprom, 16, eeprom, -1},
{"pic16c505", 1024, 1, 0, 1, 12, 0, 0, eprom, 0, rom, -1},
{"pic12f629", 1024, 1, 0x3000, 1, 14, 0, 0, flash4, 128, eeprom, 0x0f80},
{"pic12f675", 1024, 1, 0x3000, 1, 14, 0, 0, flash4, 128, eeprom, 0x0fc0},
// pic12f635: has 2 calibration words in 2008 and 2009, no osccal
// Some others below have 1 calibration word in 2008.
{"pic12f635", 1024, 0, 0, 3, 14, 0, 0, flash4, 128, eeprom, 0x0fa0},
{"pic12f683", 2048, 0, 0, 3, 14, 0, 0, flash4, 256, eeprom, 0x0460},
{"pic16f631", 1024, 0, 0, 2, 14, 0, 0, flash4, 128, eeprom, 0x1420},
{"pic16f636", 2048, 0, 0, 3, 14, 0, 0, flash4, 256, eeprom, 0x10a0}, // ?? same
{"pic16f639", 2048, 0, 0, 3, 14, 0, 0, flash4, 256, eeprom, 0x10a0}, // ?? same
{"pic16f677", 2048, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x1440},
{"pic16f684", 2048, 0, 0, 3, 14, 0, 0, flash4, 256, eeprom, 0x1080},
{"pic16f685", 4096, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x04a0},
{"pic16f687", 2048, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x1320},
{"pic16f688", 4096, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x1180},
{"pic16f689", 4096, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x1340},
{"pic16f690", 4096, 0, 0, 2, 14, 0, 0, flash4, 256, eeprom, 0x1400},
// 18f original series
// Multi-panel writes
// Write Buffer Size 8
{"pic18f242", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0480}, // Same as pic18f2439
{"pic18f248", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0800},
{"pic18f252", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0400}, // Same as pic18f2539
{"pic18f258", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0840},
{"pic18f442", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x04a0}, // Same as pic18f4439
{"pic18f448", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0820},
{"pic18f452", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0420}, // Same as pic18f4539
{"pic18f458", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0860},
{"pic18f1220", 4 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x07e0},
{"pic18f2220", 4 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0580},
{"pic18f4220", 4 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x05a0},
{"pic18f1320", 8 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x07c0},
{"pic18f2320", 8 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0500},
{"pic18f4320", 8 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0520},
{"pic18f6520", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0b20},
{"pic18f6620", 64 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0660},
{"pic18f6720", 128 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0620},
{"pic18f8520", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0b00},
{"pic18f8620", 64 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0640},
{"pic18f8720", 128 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0600},
{"pic18f6585", 48 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0a60},
{"pic18f8585", 48 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0a20},
{"pic18f6680", 64 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0a40},
{"pic18f8680", 64 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0a00},
{"pic18f6525", 48 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0ae0},
{"pic18f6621", 64 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0aa0},
{"pic18f8525", 48 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0ac0},
{"pic18f8621", 64 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 1024, eeprom, 0x0a80},
{"pic18f2439", 12 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0480}, // Same as pic18f242
{"pic18f2539", 24 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0400}, // Same as pic18f252
{"pic18f4439", 12 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x04a0}, // Same as pic18f442
{"pic18f4539", 24 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0420}, // Same as pic18f452
{"pic18f2331", 8 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x08e0},
{"pic18f2431", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x08c0},
{"pic18f4331", 8 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x08a0},
{"pic18f4431", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, flash18, 256, eeprom, 0x0880},
// PIC18F2xx0/2x21/2xx5/4xx0/4x21/4xx5
// Works without Multi-panel writes --> panel_size == 0
// Write Buffer Size differs 8, 32, 64
{"pic18f2221", 4 * 1024, 0, 0, 14, 16, 0, 8, flash18, 256, eeprom, 0x2160},
{"pic18f2321", 8 * 1024, 0, 0, 14, 16, 0, 8, flash18, 256, eeprom, 0x2120},
{"pic18f2410", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 0, eeprom, 0x1160},
{"pic18f2423", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1150}, // Revision high bit == 1
{"pic18f2420", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1140}, // Must be listed after pic18f2423
{"pic18f2450", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 0, eeprom, 0x2420},
{"pic18f2455", 24 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1260},
{"pic18f2458", 24 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x2a60},
{"pic18f2480", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1ae0},
{"pic18f2510", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 0, eeprom, 0x1120},
{"pic18f2515", 48 * 1024, 0, 0, 14, 16, 0, 64, flash18, 0, eeprom, 0x0ce0},
{"pic18f2523", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1110}, // Revision high bit == 1
{"pic18f2520", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1100}, // Must be listed after pic18f2523
{"pic18f2525", 48 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0cc0},
{"pic18f2550", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1240},
{"pic18f2553", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x2a40},
{"pic18f2580", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1ac0},
{"pic18f2585", 48 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0ee0},
{"pic18f2610", 64 * 1024, 0, 0, 14, 16, 0, 64, flash18, 0, eeprom, 0x0ca0},
{"pic18f2620", 64 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0c80},
{"pic18f2680", 64 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0ec0},
{"pic18f2682", 80 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x2700},
{"pic18f2685", 96 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x2720},
{"pic18f4221", 4 * 1024, 0, 0, 14, 16, 0, 8, flash18, 256, eeprom, 0x2140},
{"pic18f4321", 8 * 1024, 0, 0, 14, 16, 0, 8, flash18, 256, eeprom, 0x2100},
{"pic18f4410", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 0, eeprom, 0x10e0},
{"pic18f4423", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x10d0}, // Revision high bit == 1
{"pic18f4420", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x10c0}, // Must be listed after pic18f4423
{"pic18f4450", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 0, eeprom, 0x2400},
{"pic18f4455", 24 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1220},
{"pic18f4458", 24 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x2a20},
{"pic18f4480", 16 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1aa0},
{"pic18f4510", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 0, eeprom, 0x10a0},
{"pic18f4515", 48 * 1024, 0, 0, 14, 16, 0, 64, flash18, 0, eeprom, 0x0c60},
{"pic18f4523", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1090}, // Revision high bit == 1
{"pic18f4520", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1080}, // Must be listed after pic18f4523
{"pic18f4525", 48 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0c40},
{"pic18f4550", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1200},
{"pic18f4553", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x2a00},
{"pic18f4580", 32 * 1024, 0, 0, 14, 16, 0, 32, flash18, 256, eeprom, 0x1a80},
{"pic18f4585", 48 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0ea0},
{"pic18f4610", 64 * 1024, 0, 0, 14, 16, 0, 64, flash18, 0, eeprom, 0x0c20},
{"pic18f4620", 64 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0c00},
{"pic18f4680", 64 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x0e80},
{"pic18f4682", 80 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x2740},
{"pic18f4685", 96 * 1024, 0, 0, 14, 16, 0, 64, flash18, 1024, eeprom, 0x2760},
// OTP parts. ID bits are listed as 0x0002 for all of these,
// I do not know how to handle that.
{"pic18c242", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, eprom18, 0, rom, -1},
{"pic18c252", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, eprom18, 0, rom, -1},
{"pic18c442", 16 * 1024, 0, 0, 14, 16, 8*1024, 8, eprom18, 0, rom, -1},
{"pic18c452", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, eprom18, 0, rom, -1},
{"pic18c658", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, eprom18, 0, rom, -1},
{"pic18c858", 32 * 1024, 0, 0, 14, 16, 8*1024, 8, eprom18, 0, rom, -1},
/*
18f series product pages have these chips listed,
but they are not supported for now.
pic18c601 No programmable memory
pic18c801
pic18f6410 No information available, future products
pic18f6490
pic18f8410
pic18f8490
*/
// dspic - work has started.
{"dspic30f2010", 4 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x0040},
{"dspic30f2011", 4 * 3072, 0, 0, 16, 24, 0, 0, flash30, 0, rom, 0x00c0},
{"dspic30f2012", 4 * 3072, 0, 0, 16, 24, 0, 0, flash30, 0, rom, 0x00c2},
{"dspic30f3010", 8 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, -1 },
{"dspic30f3011", 8 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, -1 },
{"dspic30f3012", 8 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x00c1},
{"dspic30f3013", 8 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x00c3},
{"dspic30f3014", 8 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x0140},
{"dspic30f4011", 16 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x0101},
{"dspic30f4012", 16 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x0100},
{"dspic30f4013", 16 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x0141},
{"dspic30f5011", 22 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x0080},
{"dspic30f5013", 22 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, 0x0081},
{"dspic30f5015", 22 * 3072, 0, 0, 16, 24, 0, 0, flash30, 1024, eeprom, -1 },
{"dspic30f6010", 48 * 3072, 0, 0, 16, 24, 0, 0, flash30, 4096, eeprom, 0x0188},
{"dspic30f6011", 44 * 3072, 0, 0, 16, 24, 0, 0, flash30, 2048, eeprom, 0x0192},
{"dspic30f6012", 48 * 3072, 0, 0, 16, 24, 0, 0, flash30, 4096, eeprom, 0x0193},
{"dspic30f6013", 44 * 3072, 0, 0, 16, 24, 0, 0, flash30, 2048, eeprom, 0x0197},
{"dspic30f6014", 48 * 3072, 0, 0, 16, 24, 0, 0, flash30, 4096, eeprom, 0x0198},
};
static int got_signal = 0;
void
term_handler (int a)
{
got_signal = 1;
signal (a, term_handler);
}
int
hexfile::load (const char *name)
{
ifstream f(name);
char buf [128];
int line = 0;
unsigned long addr32 = 0;
enum formats format = unknown;
unsigned long addr;
int words, check, sum, word, i;
int e;
if (!f) {
e = errno;
cerr << name << ":unable to load hexfile:" << strerror (e) << endl;
return EX_NOINPUT;
}
if (dev < 0) {
cerr << "Internal error: no device defined" << endl;
return EX_SOFTWARE;
}
while (f.get (buf, sizeof (buf))) {
line++;
char c;
if (f.get (c) && '\n' != c) {
cerr << name << ':' << line << ":long input line" << endl;
return EX_DATAERR;
}
int len = strlen (buf);
while (len && isspace (buf [len-1]))
len--;
buf [len] = '\0';
if (!strcmp (buf, ":00000001FF")) // eof
return EX_OK;
if (15 == len
&& (unknown == format || ihx32 == format)
&& !strncmp (buf, ":02000004", 9)) {
// ihx32 address extension
format = ihx32;
check = strtol (buf + 13, 0, 16);
buf [len - 2] = '\0';
addr32 = strtol (buf + 9, 0, 16);
sum = 0x02 + 0x04 + addr32 + (addr32 >> 8);
if ((sum + check) & 0xff) {
cerr << name << ':' << line << ":checksum mismatch, checksum is 0x"
<< hex << setw(2) << setfill('0') << check << ", should be 0x"
<< setw(2) << (-sum & 0xff) << dec << endl;
return EX_DATAERR;
}
addr32 <<= 16;
continue;
}
if (!len)
continue; // empty line, I do not want to whine about it
i = len - 1;
while (i && isxdigit (buf [i]))
i--;
if (i || ':' != buf [0] || 1 != (len & 1) || len < 13
|| '0' != buf [7] || '0' != buf [8]) {
cerr << name << ':' << line << ":invalid input line." << endl
<< "Are you sure this is an 8 or 16 bit intel hex file?" << endl;
return EX_DATAERR;
}
check = strtol (buf + len - 2, 0, 16);
buf [7] = '\0';
addr = strtol (buf + 3, 0, 16);
buf [3] = '\0';
words = strtol (buf + 1, 0, 16);
if (unknown == format) {
if (words * 4 + 11 == len)
format = ihx16;
else if (words * 2 + 11 == len)
format = ihx8m;
else {
cerr << name << ':' << line <<
":unknown input format, only ihx8m, ihx16, and ihx32 accepted" << endl;
return EX_DATAERR;
}
}
if (words * (ihx16 == format ? 4 : 2) + 11 != len) {
cerr << name << ':' << line << ":line length mismatch:"
<< (ihx16 == format ? "ihx16 "
: (ihx8m == format ? "ihx8m " : "ihx32 "))
<< words * (ihx16 == format ? 4 : 2) + 11 << " != " << len << endl;
return EX_DATAERR;
}
sum = words + addr + (addr >> 8);
addr += addr32;
if (14 == deviceinfo [dev].prog_bits) {
if (ihx16 != format) {
if ((words & 1) || (addr & 1)) {
cerr << name << ':' << line
<< ":odd address or number of words." << endl;
return EX_DATAERR;
}
words /= 2;
addr /= 2;
}
while (words--) {
buf [13 + words * 4] = '\0';
word = strtol (buf + 9 + words * 4, 0, 16);
if (ihx16 != format)
word = (word & 0xff) << 8 | word >> 8;
sum += word + (word >> 8);
unsigned long a = addr + words;
if (a >= 0x2007 && a < 0x2007 + deviceinfo [dev].conf_size)
conf [a - 0x2007] = word & 0x3fff;
else if (a >= 0x2100
&& a < 0x2100 + deviceinfo [dev].data_size)
data [a - 0x2100] = word & 0x00ff;
else if (a >= 0x2000 && a < 0x2004)
ids [a - 0x2000] = word & 0x3fff;
else if (a < deviceinfo [dev].prog_size)
pgm [a] = word & 0x3fff;
else {
cerr << name << ':' << line << ":invalid address 0x" << hex
<< setw(4) << setfill('0') << addr << dec
<< ", possibly not hex file for correct pic type?"
<< endl;
return EX_DATAERR;
}
}
} else if (12 == deviceinfo [dev].prog_bits) {
if (ihx16 != format) {
if ((words & 1) || (addr & 1)) {
cerr << name << ':' << line
<< ":odd address or number of words." << endl;
return EX_DATAERR;
}
words /= 2;
addr /= 2;
}
while (words--) {
buf [13 + words * 4] = '\0';
word = strtol (buf + 9 + words * 4, 0, 16);
if (ihx16 != format)
word = (word & 0xff) << 8 | word >> 8;
sum += word + (word >> 8);
unsigned long a = addr + words;
if (a >= 0xfff && a < 0xfff + deviceinfo [dev].conf_size)
conf [a - 0xfff] = word & 0xfff;
else if (a >= deviceinfo [dev].prog_size && a < deviceinfo [dev].prog_size + 5)
// Includes 4 id words and a backup osccal word
ids [a - deviceinfo [dev].prog_size] = word & 0xfff;
else if (a < deviceinfo [dev].prog_size)
pgm [a] = word & 0xfff;
else {
cerr << name << ':' << line << ":invalid address 0x" << hex
<< setw(4) << setfill('0') << addr << dec
<< ", possibly not hex file for correct pic type?"
<< endl;
return EX_DATAERR;
}
}
} else {
// pic18, dspic30
if (ihx16 == format) {
words *= 2;
addr *= 2;
}
while (words--) {
buf [11 + words * 2] = '\0';
word = strtol (buf + 9 + words * 2, 0, 16);
sum += word;
unsigned long a = addr + words;
if (ihx16 == format)
a ^= 1;
if ((flash18 == deviceinfo [dev].prog_type)
&& a >= 0x300000 && a < 0x300000 + deviceinfo [dev].conf_size)
conf [a - 0x300000] = word;
else if ((flash18 == deviceinfo [dev].prog_type)
&& a >= 0xf00000
&& a < 0xf00000 + deviceinfo [dev].data_size)
data [a - 0xf00000] = word;
else if ((flash18 == deviceinfo [dev].prog_type)
&& a >= 0x200000 && a < 0x200008)
ids [a - 0x200000] = word;
else if (flash30 == deviceinfo [dev].prog_type
&& a >= 0xf80000 && a < 0xf80000 + deviceinfo [dev].conf_size)
conf [a - 0xf80000] = word;
else if (flash30 == deviceinfo [dev].prog_type
&& a >= 0x800000 - deviceinfo [dev].data_size
&& a < 0x800000)
data [a - (0x800000 - deviceinfo [dev].data_size)] = word;
else if (a < deviceinfo [dev].prog_size)
pgm [a] = word;
else {
cerr << name << ':' << line << ":invalid address 0x" << hex
<< setw(6) << setfill('0') << a << dec
<< ", possibly not hex file for correct pic type?"
<< endl;
return EX_DATAERR;
}
}
}
if ((sum + check) & 0xff) {
cerr << name << ':' << line << ":checksum mismatch, checksum is 0x"
<< hex << setw(2) << setfill('0') << check << ", should be 0x"
<< setw(2) << (-sum & 0xff) << dec << endl;
return EX_DATAERR;
}
}
e = errno;
if (!f.eof ()) {
cerr << name << ':' << line << ':' << strerror (e) << ":" << endl;
return EX_IOERR;
}
cerr << name << ':' << line << ":warning:unexpected eof" << endl;
return EX_OK;
}
void
hexfile::save_line (ofstream& f, const short *pgmp, unsigned long begin, unsigned long len, enum hexfile::formats format) const
{
unsigned long p_begin, p_len, i;
int sum;
// f << "#saving line " << setw(6) << begin << " len " << setw(2) << len << endl;
if (14 == deviceinfo [dev].prog_bits) {
if (ihx16 == format) {
p_begin = begin;
p_len = len;
} else {
p_begin = begin * 2;
p_len = len * 2;
}
f << ':' << setw (2) << p_len << setw (4) << (p_begin & 0xffff) << "00";
sum = p_len + p_begin + (p_begin >> 8);
for (i = 0; i != len; i++) {
int word = pgmp [i];
if (ihx16 != format)
word = (word & 0xff) << 8 | (word & 0xff00) >> 8;
f << setw (4) << word;
sum += word + (word >> 8);
}
f << setw (2) << (-sum & 0xff) << endl;
} else {
// pic18, dspic30
f << ':' << setw (2) << len << setw (4) << (begin & 0xffff) << "00";
sum = len + begin + (begin >> 8);
for (i = 0; i != len; i++) {
int word = pgmp [i];
f << setw (2) << word;
sum += word;
}
f << setw (2) << (-sum & 0xff) << endl;
}
}
int
hexfile::save_region (ofstream& f, const short *pgmp, unsigned long addr0, unsigned long len0, enum hexfile::formats format, bool skip_ones, unsigned long &addr32) const
{
unsigned long len;
unsigned long addr = addr0;
short skip_value;
unsigned long rowlen;
if (!skip_ones)
skip_value = -1;
else if (16 <= deviceinfo [dev].prog_bits
|| (addr0 >= 0x2100 && addr0 < 0x2100 + deviceinfo [dev].data_size))
skip_value = 0xff;
else if (12 == deviceinfo [dev].prog_bits)
skip_value = 0xfff;
else
skip_value = 0x3fff;
if (16 <= deviceinfo [dev].prog_bits)
rowlen = 16;
else
rowlen = 8;
while (addr < addr0 + len0) {
// Skip undefined locations or ignored values
if (skip_value == pgmp [addr-addr0]
|| -1 == pgmp [addr-addr0]) {
addr++;
continue;
}
len = 1;
while (len < rowlen
&& (addr + len) % rowlen
&& addr + len < addr0 + len0
&& skip_value != pgmp [addr - addr0 + len]
&& -1 != pgmp [addr - addr0 + len])
len++;
if (ihx32 == format) {
if (addr32 != (addr & 0xffff0000)) {
addr32 = addr & 0xffff0000;
int sum = 0x02 + 0x04 + (addr32 >> 16) + (addr32 >> 24);
f << ":02000004"
<< setw(4) << (addr32 >> 16)
<< setw(2) << (-sum & 0xff) << endl;
}
} else {
// not ihx32
if (addr > 0xffff) {
cerr << "ihx32 format needed for this data" << endl;
return EX_USAGE;
}
}
save_line (f, pgmp + (addr - addr0), addr, len, format);
addr += len;
}
return EX_OK;
}
int
hexfile::save (const char *name, enum hexfile::formats format, bool skip_ones) const
{
ofstream f (name);
int e;
unsigned long addr32 = 1; // flag that addr32 line must be output on first line
if (unknown == format) {
if (16 <= deviceinfo [dev].prog_bits)
format = ihx32;
else
format = ihx16;
}
if (!f) {
e = errno;
cerr << name << ":unable to open save file:" << strerror (e) << endl;
return EX_IOERR;
}
f << hex << setfill ('0') << setiosflags (ios::uppercase);
e = save_region (f, pgm, 0, deviceinfo [dev].prog_size, format, skip_ones, addr32);
if (EX_OK != e)
return e;
if (24 == deviceinfo [dev].prog_bits)
// No ids for dspic30
e = EX_OK;
else if (16 == deviceinfo [dev].prog_bits)
e = save_region (f, ids, 0x200000, 8, format, skip_ones, addr32);
else if (12 == deviceinfo [dev].prog_bits)
// Save the backup osccal word to the ids too!
e = save_region (f, ids, deviceinfo [dev].prog_size, 5, format, skip_ones, addr32);
else
e = save_region (f, ids, 0x2000, 4, format, skip_ones, addr32);
if (EX_OK != e)
return e;
if (24 == deviceinfo [dev].prog_bits)
e = save_region (f, conf, 0xf80000, deviceinfo [dev].conf_size, format, skip_ones, addr32);
else if (16 == deviceinfo [dev].prog_bits)
e = save_region (f, conf, 0x300000, deviceinfo [dev].conf_size, format, skip_ones, addr32);
else if (12 == deviceinfo [dev].prog_bits)
e = save_region (f, conf, 0xfff, deviceinfo [dev].conf_size, format, skip_ones, addr32);
else
e = save_region (f, conf, 0x2007, deviceinfo [dev].conf_size, format, skip_ones, addr32);
if (EX_OK != e)
return e;
if (24 == deviceinfo [dev].prog_bits)
e = save_region (f, data, 0x800000 - deviceinfo [dev].data_size, deviceinfo [dev].data_size, format, skip_ones, addr32);
else if (16 == deviceinfo [dev].prog_bits)
e = save_region (f, data, 0xf00000, deviceinfo [dev].data_size, format, skip_ones, addr32);
else if (12 == deviceinfo [dev].prog_bits)
e = EX_OK; // No 12 bit data areas implemented
else
e = save_region (f, data, 0x2100, deviceinfo [dev].data_size, format, skip_ones, addr32);
if (EX_OK != e)
return e;
f << ":00000001FF" << endl;
return EX_OK;
}
// Verify 8 bytes at the given address in all panels
// available in the device.
bool
hexfile::verify18 (picport& pic, const short *pgmp, unsigned long addr, unsigned long len, unsigned long panel_size, bool verbose) const
{
// If we are not handling program memory, below 0x200000, we obviously
// loop only once. Id and config memory must be written in single
// panel mode.
for (unsigned long panel = 0;
addr < 0x200000 ?
panel + addr < deviceinfo [dev].prog_size
: 0 == panel;
panel += panel_size) {
unsigned long i, j;
for (i = 0; i < len; ++i)
if (-1 != pgmp [panel + i])
break;
if (len == i)
continue;
// Find the last byte to verify
for (j = len - 1; -1 == pgmp [panel + j]; --j)
;
pic.setaddress (panel + addr + i);
for (; i <= j; ++i) {
int value = pic.command18 (picport::tread_inc);
if (value != pgmp [panel + i]
&& -1 != pgmp [panel + i]) {
if (verbose) {
cerr << pic.port() << ":" << "0x" << hex << setfill('0') << setw(6)
<< panel + addr + i
<< ": panel " << (panel >> 13)
<< ", block " << setw(4) << addr
<< ", byte " << i << ": verification failed, read 0x"
<< setw(2) << value << ", should be 0x"
<< setw(2) << pgmp [panel + i] << dec << endl;
}
return false;
}
}
} // for panels
return true;
}
// PIC18 parts code programming. Do multi-panel programming. It is
// assumed that correct mode is set before calling this method. Also
// address parameter must be < panel size, ie. 8kB for original 18f parts.
// Call with panel_size == prog_size if multipanel writes not used.
int
hexfile::program18 (picport& pic, const short *pgmp, unsigned long addr, unsigned long len, unsigned long panel_size) const
{
if (verify18 (pic, pgmp, addr, len, panel_size, false))
return 0;
unsigned long count = 0;
// Loop only once for single panel writes
for (unsigned long panel = 0;
addr < 0x200000 ?
panel + addr < deviceinfo [dev].prog_size
: 0 == panel;
panel += panel_size) {
pic.setaddress (panel + addr);
for (unsigned long i = 0; i < len; i += 2) {
picport::commands18 comm;
if (i+2 < len)
// Normal bytes of 8 byte block
comm = picport::twrite_inc2;
else if (addr < 0x200000
&& panel + panel_size + addr < deviceinfo [dev].prog_size)
// Last bytes do not need post increment
comm = picport::twrite;
else
// Last bytes of last write need programming command
comm = picport::twrite_prog;
// For locations that do not need programming, pgm[] has value
// -1. With &0xff operation, that becomes 0xff. This is fine,
// as it is the erased state of flash memory, and no bits are
// programmed to 0 state.
pic.command18 (comm,
(0xff & pgmp [panel + i])
| ((0xff & pgmp [panel + i + 1]) << 8));
count += 2;
} // for bytes (words)
} // for panels
// The programming command was issued above, and now we need the NOP
// command with programming delay.
pic.command18 (picport::nop_prog, 0);
if (!verify18 (pic, pgmp, addr, len, panel_size, true))
return -EX_IOERR;
return count;
}
/*
Locations are verified before and after programming, so unnecessary
programming is avoided and errors are detected.
PIC18 parts can only be programmed 8 locations at a time.
*/
// This is the 14 bit programming
int
hexfile::program_location (picport& pic, unsigned long addr, short word, bool isdata) const
{
int retval;
if (-1 == word
|| (retval = pic.command (isdata ? picport::data_from_data
: picport::data_from_prog)) == word)
return NOT_PROGRAMMED;
if (-1 == retval) {
cerr << pic.port() << ':' << hex << setfill ('0') << setw (4) << addr
<< dec << ":unable to read pic while programming" << endl;
return EX_IOERR;
}
pic.command (isdata ? picport::data_for_data : picport::data_for_prog,
word);
switch (deviceinfo [dev].prog_type) {
case flash2: // pic16f77
pic.command (picport::beg_prog);
pic.delay (1000*1000); // tprog = 1ms
pic.command (picport::end_prog);
break;
case prom: // pic16c
case eprom:
pic.command (picport::beg_prog);
usleep (10000); // Maximum needed programming time = 100 * 100 µs
pic.command (picport::end_prog);
break;
case flash3: // pic16f876a
if (0x2007 == addr) {
pic.command (picport::beg_prog);
usleep (10000); // tprog2 = 8ms
} else {
pic.command (picport::beg_prog_only);
pic.delay (1000*1000); // tprog = 1ms
pic.command (picport::end_prog_only);
}
break;
case flash5: // pic16f88
pic.command (picport::beg_prog_only);
pic.delay (1000*1000);
pic.command (picport::end_prog_only);
break;
case flash4:
pic.command (picport::beg_prog);
pic.delay (6*1000*1000);
break;
case flash:
case eeprom:
pic.command (picport::beg_prog);
usleep (10000);
break;
default:
cerr << "Internal error: unknown memory type: "
<< int(deviceinfo [dev].prog_type) << endl;
return EX_SOFTWARE;
}
// verify, but do not verify fuses if Code Protect bit is cleared!
int read_val;
if (word != (read_val =
pic.command (isdata ? picport::data_from_data
: picport::data_from_prog))) {
cerr << pic.port() << ':' << hex << setw (4) << setfill ('0') << addr
<< ": programmed=" << setw (4) << setfill ('0') << word
<< ", read=" << setw (4) << setfill ('0') << read_val
<< dec << ":unable to verify pic while programming." << endl;
if (pic.address () != 0x2007) {
cerr << "Is code protection enabled, or does the chip need to be " << endl
<< "erased completely before programming?" << endl
<< "Use --erase option to disable code protection." << endl;
return EX_IOERR;
} else {
cerr << "This is the configuration word, which often has hardwired" << endl
<< "bits and therefore does not verify. It also has the code" << endl
<< "protection bits, and if they were programmed to enabled" << endl
<< "state, verification fails. Therefore this error is ignored." << endl;
}
}
return EX_OK;
}
typedef void (*sig_type)(int);
void hexfile::reset_code_protection (picport& pic)
{
switch (deviceinfo [dev].prog_type) {
case flash30: // dspic30f
// Step 1
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0x040100); // GOTO 0x100
pic.command30 (picport::SIX, 0); // NOP
// Steps 2-7 only concern dspic30f601[0-4] mask 0 versions
// What does that mean??
if (0) {
// Step 2
pic.command30 (picport::SIX, 0x24008A); //
pic.command30 (picport::SIX, 0x883B0A); //
// Step 3
pic.command30 (picport::SIX, 0x200F80); //
pic.command30 (picport::SIX, 0x880190); //
pic.command30 (picport::SIX, 0x200067); //
pic.command30 (picport::SIX, 0xEB0300); //
// Step 4
pic.command30 (picport::SIX, 0x231010); //
// Step 5
pic.command30 (picport::SIX, 0xBB0B96); //
// Step 6
pic.command30 (picport::SIX, 0x200558); // MOV #0x55, W8
pic.command30 (picport::SIX, 0x883B38); // MOV W8, NVMKEY
pic.command30 (picport::SIX, 0x200AA9); // MOV #0xAA, W9
pic.command30 (picport::SIX, 0x883B39); // MOV W9, NVMKEY
// Step 7
pic.command30 (picport::SIX, 0xA8E761); // BSET NVMCON, #WR
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0); // NOP
usleep (2000);
pic.command30 (picport::SIX, 0xA9E761); // BCLR NVMCON, #WR
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0); // NOP
}
// Step 8
pic.command30 (picport::SIX, 0x2407FA); // MOV #0x407F, W10
pic.command30 (picport::SIX, 0x883B0A); // MOV W10, NVMCON
// Step 9
pic.command30 (picport::SIX, 0x200558); // MOV #0x55, W8
pic.command30 (picport::SIX, 0x883B38); // MOV W8, NVMKEY
pic.command30 (picport::SIX, 0x200AA9); // MOV #0xAA, W9
pic.command30 (picport::SIX, 0x883B39); // MOV W9, NVMKEY
// Step 10
pic.command30 (picport::SIX, 0xA8E761); // BSET NVMCON, #WR
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0); // NOP
usleep (2000);
pic.command30 (picport::SIX, 0xA9E761); // BCLR NVMCON, #WR
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0); // NOP
break;
case flash18: // pic18f
// new series has different erase algorithm
if (!deviceinfo [dev].panel_size) {
pic.setaddress (0x3c0005);
pic.command18 (picport::twrite, 0x0F0F); // Write 0F0F to 3c0005h
pic.setaddress (0x3c0004);
pic.command18 (picport::twrite, 0x8787); // Write 8787 to 3c0004h
pic.command18 (picport::instr, 0); // NOP
pic.command18 (picport::nop_erase, 0); // NOP, delay
break;
}
// fallthrough for original pic18f series
case eprom18: // pic18c - unsupported
pic.setaddress (0x3c0004);
pic.command18 (picport::twrite, 0x0080); // Write 80h to 3c0004h
pic.command18 (picport::instr, 0); // NOP
pic.command18 (picport::nop_erase, 0); // NOP, delay
break;
case flash2: // pic16f77, pic12f
// pic12f508, pic12f509 do not have load_conf, but full erase
// needs another magic address thing. See 41227D.
if (deviceinfo [dev].prog_bits == 12) {
while (pic.address () != deviceinfo [dev].prog_size)
pic.command (picport::inc_addr, addr_max);
} else
pic.command (picport::load_conf, 0x3fff);
pic.command (picport::erase_prog);
break;
case flash3: // pic16f876a
case flash5: // pic16f88
pic.command (picport::load_conf, 0x3fff);
pic.command (picport::chip_erase);
break;
case flash4: // pic16f628a
pic.command (picport::load_conf, 0x3fff);
pic.command (picport::erase_prog);
usleep (50000);
pic.command (picport::erase_data);
break;
default: // eeprom, flash
pic.command (picport::load_conf, 0x3fff);
for (int i = 0; i < 7; i++)
pic.command (picport::inc_addr);
assert (0x2007 == pic.address ());
pic.command (picport::command1);
pic.command (picport::command7);
pic.command (picport::beg_prog);
usleep (20000);
pic.command (picport::command1);
pic.command (picport::command7);
// On my pic16f628, the above leaves data memory not erased,
// if the code protection was not on.
pic.command (picport::data_for_data, 0x3fff);
pic.command (picport::erase_data);
pic.command (picport::beg_prog);
}
usleep (50000);
pic.reset (deviceinfo [dev].prog_bits == 12 ? 0xfff : 0);
}
int
hexfile::program (picport &pic, bool reset, bool nopreserve)
{
int retval;
sig_type save_t, save_q, save_i;
save_t = signal (SIGTERM, term_handler);
save_q = signal (SIGQUIT, term_handler);
save_i = signal (SIGINT, term_handler);
cout << "Device " << deviceinfo [dev].name
<< ", program memory: " << deviceinfo [dev].prog_size
<< ", data memory: " << deviceinfo [dev].data_size << "."
<< endl;
if ((rom == deviceinfo [dev].data_type || 0 == deviceinfo [dev].data_size)
&& (rom == deviceinfo [dev].prog_type || 0 == deviceinfo [dev].prog_size)) {
cerr << "This type of device has no programmable memory." << endl;
return EX_USAGE;
}
// As PIC18 parts never have prog_preserved, it does not have to
// be tested here.
if (deviceinfo [dev].prog_preserved && !nopreserve) {
if (!reset) {
// Chip is not erased, so we just need to avoid programming
// the reserved locations.
for (unsigned long addr = deviceinfo [dev].prog_size - deviceinfo [dev].prog_preserved;
addr != deviceinfo [dev].prog_size;
++addr) {
cout << "Calibration word at "
<< hex << setfill('0') << setw(4) << addr << dec
<< " not programmed";
if (-1 != pgm [addr]) {
pgm [addr] = -1;
cout << " (value in input file ignored)";
}
cout << endl;
}
if (deviceinfo [dev].prog_bits == 12) { // 12f508, 12f509
// Backup osccal word.
unsigned long addr = deviceinfo [dev].prog_size + 4;
cout << "Calibration word at "
<< hex << setfill('0') << setw(4) << addr << dec
<< " not programmed";
if (-1 != ids [addr - deviceinfo [dev].prog_size]) {
ids [addr - deviceinfo [dev].prog_size] = -1;
cout << " (value in input file ignored)";
}
cout << endl;
}
} else {
// We are erasing the chip. Read OSCCAL and other reserved
// words off the device first.
// Make sure we are in the program memory and below OSCCAL
// address
if (pic.address () > deviceinfo [dev].prog_size - deviceinfo [dev].prog_preserved) {
if (deviceinfo [dev].prog_bits == 12) {
// 12f508/509 reset to configuration word.
if (pic.address () != 0xfff)
pic.reset (0xfff);
// We need to step them to address 0.
if (pic.address () == 0xfff && pic.address () > deviceinfo [dev].prog_size - deviceinfo [dev].prog_preserved)
pic.command (picport::inc_addr, addr_max);
} else {
if (pic.address ())
pic.reset (0);
}
}
for (;;) {
if (pic.address () >= deviceinfo [dev].prog_size - deviceinfo [dev].prog_preserved
&& pic.address () < deviceinfo [dev].prog_size) {
int value = pic.command (picport::data_from_prog);
if (-1 == value) {
cerr << pic.port() << ':'
<< hex << setfill ('0') << setw (4) << pic.address () << dec
<< ":unable to read pic calibration words" << endl;
return EX_IOERR;
}
cout << "Calibration word at 0x"
<< hex << setfill('0') << setw(4) << pic.address()
<< " preserved as 0x"
<< setfill('0') << setw(4) << value << dec;
if (-1 != pgm [pic.address ()])
cout << " (value in input file ignored)";
cout << endl;
pgm [pic.address ()] = value;
}
if (pic.address () + 1 == deviceinfo [dev].prog_size)
break;
pic.command (picport::inc_addr, addr_max);
} // for
if (deviceinfo [dev].prog_bits == 12) { // 12f508, 12f509
// Backup osccal word.
for (;;) {
if (pic.address () == deviceinfo [dev].prog_size + 4) {
int value = pic.command (picport::data_from_prog);
if (-1 == value) {
cerr << pic.port() << ':'
<< hex << setfill ('0') << setw (4) << pic.address () << dec
<< ":unable to read pic calibration words" << endl;
return EX_IOERR;
}
cout << "Calibration word at 0x"
<< hex << setfill('0') << setw(4) << pic.address()
<< " preserved as 0x"
<< setfill('0') << setw(4) << value << dec;
if (-1 != ids [pic.address () - deviceinfo [dev].prog_size])
cout << " (value in input file ignored)";
cout << endl;
ids [pic.address () - deviceinfo [dev].prog_size] = value;
break; // Only 1 backup word
}
pic.command (picport::inc_addr, addr_max);
}
} // if 12f508 12f509
}
}
// As PIC18 parts never have config_mask, it does not have to be
// tested here.
if (deviceinfo [dev].config_mask && !nopreserve) {
if (reset || -1 != conf [0]) {
pic.command (picport::load_conf, 0);
for (int i = 0; i < 7; ++i)
pic.command (picport::inc_addr);
assert (0x2007 == pic.address());
int value;
if (-1 == (value = pic.command (picport::data_from_prog))) {
cerr << pic.port() << ':' << hex << setfill ('0') << setw (4) << pic.address () << dec
<< ":unable to read pic calibration bits" << endl;
return EX_IOERR;
}
value &= deviceinfo [dev].config_mask;
cout << "Calibration bits 0x"
<< hex << setfill('0') << setw(4) << deviceinfo [dev].config_mask
<< " in configuration word preserved as 0x"
<< setfill('0') << setw(4) << value << dec << endl;
if (-1 == conf [0])
conf [0] = 0x3fff;
conf [0] = (conf [0] & ~deviceinfo [dev].config_mask) | value;
} else {
cout << "Calibration bits 0x"
<< hex << setfill('0') << setw(4) << deviceinfo [dev].config_mask
<< dec << " in configuration word not programmed" << endl;
}
}
if (reset) {
if (rom == deviceinfo [dev].prog_type
|| prom == deviceinfo [dev].prog_type
|| eprom == deviceinfo [dev].prog_type) {
cerr << "I do not know how to erase this device." << endl;
return EX_UNAVAILABLE;
}
reset_code_protection (pic);
cout << "Erased and removed code protection." << endl;
}
if (deviceinfo [dev].prog_bits == 12) {
// 12f508/509 reset to configuration word.
if (pic.address () != 0xfff && pic.address () != 0)
pic.reset (0xfff);
// We need to step them to address 0.
if (pic.address () == 0xfff)
pic.command (picport::inc_addr, addr_max);
} else {
if (pic.address ())
pic.reset (0);
}
int count;
if (rom == deviceinfo [dev].prog_type || 0 == deviceinfo [dev].prog_size) {
cout << "Skipped burning program memory," << endl;
} else {
cout << "Burning program memory," << flush;
count = 0;
if (16 == deviceinfo [dev].prog_bits) {
// Enable access to config memory
pic.command18 (picport::instr, 0x8ea6);
pic.command18 (picport::instr, 0x8ca6);
pic.command18 (picport::instr, 0x86A6);
if (deviceinfo [dev].panel_size) {
// Configure device for multi-panel writes.
pic.setaddress (0x3c0006);
pic.command18 (picport::twrite, 0x0040);
} else {
// Disable multi-panel writes.
pic.setaddress (0x3c0006);
pic.command18 (picport::twrite, 0x0000);
}
// Enable access to program memory.
pic.command18 (picport::instr, 0x8ea6);
pic.command18 (picport::instr, 0x9ca6);
pic.setaddress (0);
}
unsigned long addr = pic.address ();
unsigned long panel_size = deviceinfo [dev].panel_size;
if (!panel_size || panel_size > deviceinfo [dev].prog_size)
panel_size = deviceinfo [dev].prog_size;
while (addr < panel_size) {
if (16 == deviceinfo [dev].prog_bits) {
int len = deviceinfo [dev].write_size;
retval = program18 (pic, pgm + addr, addr, len, panel_size);
if (retval >= 0)
count += retval;
else
return -retval;
addr += len;
} else { // 12 bit and 14 bit
retval = program_location (pic, addr, pgm [addr], false);
if (EX_OK == retval)
++count;
else if (NOT_PROGRAMMED != retval)
return retval;
pic.command (picport::inc_addr, addr_max);
addr = pic.address ();
}
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
}
cout << " " << count << " location" << (count != 1 ? "s" : "") << "," << endl;
}
if (rom == deviceinfo [dev].data_type || 0 == deviceinfo [dev].data_size) {
cout << "skipped burning data memory," << endl;
} else {
cout << "burning data memory," << flush;
count = 0;
if (16 == deviceinfo [dev].prog_bits) {
// Direct access to data EEPROM.
pic.command18 (picport::instr, 0x9ea6);
pic.command18 (picport::instr, 0x9ca6);
}
for (unsigned long addr = 0;
addr < deviceinfo [dev].data_size;
++addr) {
if (16 == deviceinfo [dev].prog_bits) {
if (-1 == data [addr])
retval = NOT_PROGRAMMED;
else {
// Set the data EEPROM address pointer.
pic.command18 (picport::instr, 0x0e00 | (addr & 0x00ff));
pic.command18 (picport::instr, 0x6ea9);
pic.command18 (picport::instr, 0x0e00 | ((addr & 0xff00) >> 8));
pic.command18 (picport::instr, 0x6eaa);
// Initiate a memory read.
pic.command18 (picport::instr, 0x80a6);
// Load data into the serial data holding register.
pic.command18 (picport::instr, 0x50a8);
pic.command18 (picport::instr, 0x6ef5);
pic.command18 (picport::instr, 0x0000);
int word = pic.command18 (picport::shift_out);
if (word == data [addr])
retval = NOT_PROGRAMMED;
else {
// Load the data to be written.
pic.command18 (picport::instr, 0x0e00 | (data [addr] & 0x00ff));
pic.command18 (picport::instr, 0x6ea8);
// Enable memory writes.
pic.command18 (picport::instr, 0x84a6);
// Perform required sequence.
pic.command18 (picport::instr, 0x0e55);
pic.command18 (picport::instr, 0x6ea7);
pic.command18 (picport::instr, 0x0eaa);
pic.command18 (picport::instr, 0x6ea7);
// Initiate write.
pic.command18 (picport::instr, 0x82a6);
// Poll EECON1 WR bit, repeat until the bit is clear.
do {
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
pic.command18 (picport::instr, 0x50a6);
pic.command18 (picport::instr, 0x6ef5);
pic.command18 (picport::instr, 0x0000);
word = pic.command18 (picport::shift_out);
} while (word & 2);
// Disable writes.
pic.command18 (picport::instr, 0x94a6);
// Read to verify
// Initiate a memory read.
pic.command18 (picport::instr, 0x80a6);
// Load data into the serial data holding register.
pic.command18 (picport::instr, 0x50a8);
pic.command18 (picport::instr, 0x6ef5);
pic.command18 (picport::instr, 0x0000);
word = pic.command18 (picport::shift_out);
if (word == data [addr])
retval = EX_OK;
else {
cerr << pic.port() << ':' << hex << setw (6) << setfill ('0') << 0xf00000 + addr
<< ": programmed=" << setw (2) << setfill ('0') << data [addr]
<< ", read=" << setw (2) << setfill ('0') << word
<< dec << ":unable to verify pic data eeprom while programming." << endl;
retval = EX_IOERR;
}
}
}
} else if (12 == deviceinfo [dev].prog_bits) {
cerr << "12 bit microcontroller data memory unimplemented." << endl;
retval = NOT_PROGRAMMED;
got_signal = 1;
} else { // 14 bit
retval = program_location (pic, 0x2100 + addr, data [addr], true);
pic.command (picport::inc_addr);
}
if (EX_OK == retval)
++count;
else if (NOT_PROGRAMMED != retval)
return retval;
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
}
cout << " " << count << " location" << (count != 1 ? "s" : "") << "," << endl;
}
cout << "burning id words," << flush;
count = 0;
if (16 == deviceinfo [dev].prog_bits) {
// Enable access to config memory
pic.command18 (picport::instr, 0x8ea6);
pic.command18 (picport::instr, 0x8ca6);
pic.command18 (picport::instr, 0x86A6);
// Disable multi-panel writes.
pic.setaddress (0x3c0006);
pic.command18 (picport::twrite, 0x0000);
// Enable access to code memory.
pic.command18 (picport::instr, 0x8ea6);
pic.command18 (picport::instr, 0x9ca6);
retval = program18 (pic, ids, 0x200000, 8, 8);
if (retval >= 0)
count += retval;
else
return -retval;
} else if (12 == deviceinfo [dev].prog_bits) {
while (pic.address () != deviceinfo [dev].prog_size)
pic.command (picport::inc_addr, addr_max);
// id words and backup osccal word
while (pic.address () < deviceinfo [dev].prog_size + 5) {
retval = program_location (pic, pic.address (), ids [pic.address () - deviceinfo [dev].prog_size], false);
if (EX_OK == retval)
++count;
else if (NOT_PROGRAMMED != retval)
return retval;
pic.command (picport::inc_addr, addr_max);
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
}
} else { // 14 bit
pic.command (picport::load_conf, 0x3fff); // dummy value
while (pic.address () < 0x2004) {
retval = program_location (pic, pic.address (), ids [pic.address () - 0x2000], false);
if (EX_OK == retval)
++count;
else if (NOT_PROGRAMMED != retval)
return retval;
pic.command (picport::inc_addr);
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
}
} // 14 bit
cout << " " << count << " location" << (count != 1 ? "s" : "") << "," << endl;
cout << "burning fuses," << flush;
count = 0;
if (16 == deviceinfo [dev].prog_bits) {
// Enable access to config memory
pic.command18 (picport::instr, 0x8ea6);
pic.command18 (picport::instr, 0x8ca6);
// Position the program counter
pic.command18 (picport::instr, 0xef00);
pic.command18 (picport::instr, 0xf800); // GOTO 100000h
bool printerr = true;
for (unsigned long addr = 0; addr < deviceinfo [dev].conf_size; ++addr) {
if (-1 == conf [addr])
continue;
pic.setaddress (0x300000 + addr);
int word = pic.command18 (picport::tread);
if (word == conf [addr])
continue;
word = conf [addr];
if (addr & 1)
word <<= 8;
pic.command18 (picport::twrite_prog, word);
pic.command18 (picport::nop_prog, 0);
word = pic.command18 (picport::tread);
if (word != conf [addr]) {
cerr << pic.port() << ":" << "0x" << hex << setfill('0') << setw(6)
<< 0x300000 + addr << ": configuration byte verification failed, read 0x"
<< setw(2) << word << ", should be 0x"
<< setw(2) << conf [addr] << dec << endl;
if (printerr) {
printerr = false;
cerr << "This is a configuration byte, which often has hardwired" << endl
<< "bits and therefore does not verify. It also may have code" << endl
<< "protection bits, and if they were programmed to enabled" << endl
<< "state, verification may fail. Therefore this error is ignored." << endl;
}
}
++count;
}
} else if (12 == deviceinfo [dev].prog_bits) {
// 12f508/12f509 reset to configuration word,
// and the only time the config word is accessable,
// is right after the reset.
pic.reset (0xfff);
// Only one config word.
retval = program_location (pic, pic.address (),
conf [pic.address () - 0xfff], false);
if (EX_OK == retval)
++count;
else if (NOT_PROGRAMMED != retval)
return retval;
} else { // 14 bit
pic.command (picport::inc_addr);
pic.command (picport::inc_addr);
while (pic.address () + 1 < 0x2007 + deviceinfo [dev].conf_size) {
pic.command (picport::inc_addr);
retval = program_location (pic, pic.address (),
conf [pic.address () - 0x2007], false);
if (EX_OK == retval)
++count;
else if (NOT_PROGRAMMED != retval)
return retval;
}
// pic12f635 and friends need to reset write latches,
// but as this is the last operation on them, no need
// to do that.
} // 14 bit
cout << " " << count << " location" << (count != 1 ? "s" : "") << "," << endl;
cout << "done." << endl;
signal (SIGTERM, save_t);
signal (SIGQUIT, save_q);
signal (SIGINT, save_i);
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
return EX_OK;
}
int
hexfile::read_code (picport &pic, short *pgmp, unsigned long addr, unsigned long len)
{
time_t tv1 = time(0);
// 14 bit and 12 bit parts must make sure the address
// is correct before calling this function.
if (16 == deviceinfo [dev].prog_bits)
pic.setaddress (addr);
for (unsigned long i = 0; i != len; ++i) {
assert (pic.address () == addr + i);
time_t tv2 = time(0);
if (tv2 >= tv1 + 2) {
tv1 = tv2;
cerr << "\r" << hex << setfill('0') << setw(4) << pic.address () << dec
<< " \r";
}
if (16 == deviceinfo [dev].prog_bits) {
pgmp [i] = pic.command18 (picport::tread_inc);
} else if (12 == deviceinfo [dev].prog_bits) {
pgmp [i] = pic.command (picport::data_from_prog) & 0xfff;
pic.command (picport::inc_addr, addr_max);
} else { // 14 bit
pgmp [i] = pic.command (picport::data_from_prog);
pic.command (picport::inc_addr);
}
if (-1 == pgmp [i]) {
cerr << hex << setfill ('0') << setw (4) << addr + i << dec
<< ":unable to read pic" << endl;
return EX_IOERR;
}
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
}
return EX_OK;
}
int
hexfile::read (picport &pic)
{
sig_type save_t, save_q, save_i;
save_t = signal (SIGTERM, term_handler);
save_q = signal (SIGQUIT, term_handler);
save_i = signal (SIGINT, term_handler);
cout << "Device " << deviceinfo [dev].name
<< ", program memory: " << deviceinfo [dev].prog_size;
if (rom == deviceinfo [dev].prog_type && deviceinfo [dev].prog_size)
cout << " (rom)";
cout << ", data memory: " << deviceinfo [dev].data_size;
if (rom == deviceinfo [dev].data_type && deviceinfo [dev].data_size)
cout << " (rom)";
cout << "." << endl;
int e;
if (deviceinfo [dev].prog_bits == 12) {
// 12f508/509 reset to configuration word.
if (pic.address () != 0xfff && pic.address () != 0)
pic.reset (0xfff);
// We need to step them to address 0.
if (pic.address () == 0xfff)
pic.command (picport::inc_addr, addr_max);
} else {
if (pic.address ())
pic.reset (0);
}
if (0 == deviceinfo [dev].prog_size) {
cout << "Skipped reading program memory," << endl;
} else {
cout << "Reading program memory," << endl;
e = read_code (pic, pgm, 0, deviceinfo [dev].prog_size);
if (EX_OK != e)
return e;
}
if (0 == deviceinfo [dev].data_size) {
cout << "skipped reading data memory," << endl;
} else {
cout << "reading data memory," << endl;
if (16 == deviceinfo [dev].prog_bits) {
// Direct access to data EEPROM.
pic.command18 (picport::instr, 0x9ea6);
pic.command18 (picport::instr, 0x9ca6);
}
for (unsigned long addr = 0;
addr < deviceinfo [dev].data_size;
++addr) {
if (16 == deviceinfo [dev].prog_bits) {
// Set the data EEPROM address pointer.
pic.command18 (picport::instr, 0x0e00 | (addr & 0x00ff));
pic.command18 (picport::instr, 0x6ea9);
pic.command18 (picport::instr, 0x0e00 | ((addr & 0xff00) >> 8));
pic.command18 (picport::instr, 0x6eaa);
// Initiate a memory read.
pic.command18 (picport::instr, 0x80a6);
// Load data into the serial data holding register.
pic.command18 (picport::instr, 0x50a8);
pic.command18 (picport::instr, 0x6ef5);
data [addr] = pic.command18 (picport::shift_out);
} else if (12 == deviceinfo [dev].prog_bits) {
cerr << "12 bit microcontroller data memory unimplemented." << endl;
got_signal = 1;
} else { // 14 bit
assert (addr == pic.address () % deviceinfo [dev].data_size);
data [addr] = pic.command (picport::data_from_data);
pic.command (picport::inc_addr);
}
if (-1 == data [addr]) {
cerr << pic.port() << ':' << hex << setfill ('0') << setw (4)
<< addr << dec
<< ":unable to read pic data memory" << endl;
return EX_IOERR;
}
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
}
}
cout << "reading id words," << endl;
if (24 == deviceinfo [dev].prog_bits) {
// no ids in dspic30
e = EX_OK;
} else if (16 == deviceinfo [dev].prog_bits) {
e = read_code (pic, ids, 0x200000, 8);
} else if (12 == deviceinfo [dev].prog_bits) {
while (pic.address () != deviceinfo [dev].prog_size)
pic.command (picport::inc_addr, addr_max);
// 12f508/12f509 backup osccal is included in ids
e = read_code (pic, ids, deviceinfo [dev].prog_size, 5);
} else {
pic.command (picport::load_conf, 0);
e = read_code (pic, ids, 0x2000, 4);
}
if (EX_OK != e)
return e;
// fuses
cout << "reading fuses," << endl;
if (24 == deviceinfo [dev].prog_bits) {
e = read_code (pic, conf, 0xf80000, deviceinfo [dev].conf_size);
} else if (16 == deviceinfo [dev].prog_bits) {
e = read_code (pic, conf, 0x300000, deviceinfo [dev].conf_size);
} else if (12 == deviceinfo [dev].prog_bits) {
// Only reset allows us to access the config word.
pic.reset (0xfff);
e = read_code (pic, conf, 0xfff, deviceinfo [dev].conf_size);
} else {
pic.command (picport::inc_addr);
pic.command (picport::inc_addr);
pic.command (picport::inc_addr);
e = read_code (pic, conf, 0x2007, deviceinfo [dev].conf_size);
}
if (EX_OK != e)
return e;
cout << "done." << endl;
signal (SIGTERM, save_t);
signal (SIGQUIT, save_q);
signal (SIGINT, save_i);
if (got_signal) {
cerr << "Exiting." << endl;
return EX_UNAVAILABLE;
}
return EX_OK;
}
int
hexfile::setdevice (picport &pic, int& d)
{
if (-1 == d && -1 != dev)
d = dev;
if (-1 == d) {
// Read version information off the chip at address 0x2006
pic.command (picport::load_conf, 0);
for (int i = 0; i < 6; ++i)
pic.command (picport::inc_addr);
assert (0x2006 == pic.address());
int version = 0;
int value = pic.command (picport::data_from_prog);
int family = 14;
if (0x3fff == value) {
// Either the device is old model and does not have id bits, or
// it is 18F device and needs another programming algorithm.
// Let's try that first and only default if it fails.
// Enable access to program memory.
pic.command18 (picport::instr, 0x8ea6);
pic.command18 (picport::instr, 0x9ca6);
pic.setaddress (0x3ffffe);
value = pic.command18 (picport::tread_inc, 0);
int v1 = pic.command18 (picport::tread, 0);
if (-1 != value && -1 != v1) {
value |= (v1 << 8);
if (0xffff != value)
family = 16;
}
if (16 != family) {
// If may be dspic30 then
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0x040100); // GOTO 0x100
pic.command30 (picport::SIX, 0); // NOP
pic.setaddress30 (0xff0000);
// Step 3
pic.command30 (picport::SIX, 0xEB0380); // CLR W7
pic.command30 (picport::SIX, 0xBA0BB6); // TBLRDL [W6++], [W7]
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0x883C20); // MOV W0, VISI
pic.command30 (picport::SIX, 0); // NOP
// Step 4
value = pic.command30 (picport::REGOUT); //
pic.command30 (picport::SIX, 0); // NOP
// Step 5
pic.command30 (picport::SIX, 0x040100); // GOTO 0x100
pic.command30 (picport::SIX, 0); // NOP
// Step 3
pic.command30 (picport::SIX, 0xEB0380); //
pic.command30 (picport::SIX, 0xBA0BB6); //
pic.command30 (picport::SIX, 0); // NOP
pic.command30 (picport::SIX, 0x883C20); //
pic.command30 (picport::SIX, 0); // NOP
// Step 4
version = pic.command30 (picport::REGOUT); //
pic.command30 (picport::SIX, 0); // NOP
// Step 5
pic.command30 (picport::SIX, 0x040100); // GOTO 0x100
pic.command30 (picport::SIX, 0); // NOP
cerr << hex << "value: 0x" << setw(4) << setfill('0') << value
<< " version: 0x" << setw(4) << setfill('0') << version
<< dec << endl;
if (0xffff != value && 0xffff != version)
family = 24;
else
value = -1;
}
}
if (-1 == value) {
cerr << pic.port() << ':' << hex << setfill ('0') << setw (4) << pic.address () << dec
<< ":unable to read pic device id" << endl;
return EX_IOERR;
}
d = 0;
if (0xffff == value)
cout << pic.port() << ": old device does not have id, defaulting to "
<< deviceinfo [d].name << endl;
else
for (;;++d) {
if (d >= int(sizeof (hexfile::deviceinfo)
/ sizeof (hexfile::deviceinfo [0]))) {
d = 0;
cout << pic.port() << ": ";
if (16 == family)
cout << "pic18 ";
else if (24 == family)
cout << "dspic30 ";
cout << "device id 0x"
<< hex << setfill ('0') << setw (4) << value;
if (24 == family)
cout << " revision 0x" << setfill ('0') << setw (4) << version;
cout << dec << " unknown, exiting." << endl;
return EX_PROTOCOL;
}
if (24 == family) {
if (-1 != deviceinfo [d].device_id
&& deviceinfo [d].prog_bits == family
&& deviceinfo [d].device_id == value) {
cout << pic.port()
<< ": id 0x" << hex << setfill ('0') << setw(4) << value
<< ": detected " << deviceinfo [d].name
<< " version 0x" << setw (4) << version << dec << endl;
break;
}
} else {
// Some devices like 18f2423, 2523, 4423 and 4523 can be detected
// from the set revision high bit.
int mask = 0xffe0 | (0x0010 & deviceinfo [d].device_id);
//if (-1 != deviceinfo [d].device_id && (mask & 0x0010)) {
// cerr << deviceinfo[d].name << " has version bit in mask\n";
//}
if (-1 != deviceinfo [d].device_id
&& deviceinfo [d].prog_bits == family
&& (deviceinfo [d].device_id & mask) == (value & mask)) {
cout << pic.port()
<< ": id 0x" << hex << setfill ('0') << setw(4) << value
<< ": detected " << deviceinfo [d].name
<< " version 0x" << setw (2) << (value & 0x1f & ~mask) << dec << endl;
break;
}
}
}
} else if (d < 0 || d >= int(sizeof (deviceinfo)
/ sizeof (deviceinfo [0]))) {
cerr << "Internal error: invalid device id " << d << endl;
return EX_SOFTWARE;
};
dev = d;
if (pgm)
delete [] pgm;
if (data)
delete [] data;
pgm = data = 0;
if (deviceinfo [dev].prog_size) {
pgm = new short [deviceinfo [dev].prog_size];
if (!pgm) {
cerr << "Out of memory, trying to allocate "
<< deviceinfo [dev].prog_size * sizeof (short)
<< " bytes" << endl;
return EX_UNAVAILABLE;
}
}
if (deviceinfo [dev].data_size) {
data = new short [deviceinfo [dev].data_size];
if (!data) {
cerr << "Out of memory, trying to allocate "
<< deviceinfo [dev].data_size * sizeof (short)
<< " bytes" << endl;
return EX_UNAVAILABLE;
}
}
unsigned long i;
for (i = 0; i < deviceinfo [dev].prog_size; ++i)
pgm [i] = -1;
for (i = 0; i < deviceinfo [dev].data_size; ++i)
data [i] = -1;
assert (deviceinfo [dev].conf_size <= 16);
for (i = 0; i < 16; ++i)
conf [i] = -1;
for (i = 0; i < 8; ++i)
ids [i] = -1;
if (deviceinfo [dev].prog_bits == 12) // 12f508 12f509
addr_max = deviceinfo [dev].prog_size * 2;
else
addr_max = 0;
return EX_OK;
}
// Couple of statics in hexfile class.
int
hexfile::find_device (const char *name)
{
if (!name)
return -1;
for (unsigned d = 0;
d < sizeof (deviceinfo) / sizeof (struct hexfile::devinf);
++d)
if (!strcasecmp (hexfile::deviceinfo [d].name, name))
return d;
return -1;
}
void
hexfile::print_devices ()
{
for (unsigned d = 0;
d < sizeof (hexfile::deviceinfo) / sizeof (struct hexfile::devinf);
++d) {
if (12 == deviceinfo [d].prog_bits)
continue;
if (d)
cerr << ", ";
cerr << deviceinfo [d].name;
if (-1 != deviceinfo [d].device_id)
cerr << "*";
}
cerr << endl
<< "* = autodetected" << endl;
}
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/main.cc�������������������������������������������������������������������������������0000644�0000765�0000765�00000014513�11361223522�013056� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/* -*- c++ -*-
This is Picprog, Microchip PIC programmer software for the serial port device.
Copyright © 1997,2002,2003,2004,2006,2008,2010 Jaakko Hyvätti
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Phone: +358 40 5011222
Please send any suggestions, bug reports, success stories etc. to the
Email address above. Include word 'picprog' in the subject line to
make sure your email passes my spam filtering.
*/
#include
#include
#include
#include
#include
#include
#include "hexfile.h"
#include "program.h"
using namespace std;
program prog;
char short_opts [] = "d:p:i:o:c:qh?";
static const char *
getenv_default (const char *var, const char *def)
{
const char *val = getenv (var);
if (val && *val)
return val;
return def;
}
int
main (int argc, char **argv)
{
int opt_warranty = 0;
int opt_copying = 0;
int opt_quiet = 0;
int opt_usage = 0;
int opt_format = hexfile::unknown;
const char *opt_port = getenv_default ("PIC_PORT", "/dev/ttyS0");
const char *opt_input = NULL;
const char *opt_output = NULL;
const char *opt_cc = NULL;
int opt_skip = 0;
int opt_erase = 0;
int opt_burn = 0;
int opt_calibration = 0;
int opt_nordtsc = 1;
int opt_slow = 0;
int opt_reboot = 0;
int opt_hardware = (int)(picport::jdm);
// Auto ident (-1) is the default, or if that fails, first device (0)
int opt_device = hexfile::find_device (getenv ("PIC_DEVICE"));
struct option long_opts[] = {
{"quiet", no_argument, NULL, 'q'},
{"warranty", no_argument, &opt_warranty, 1},
{"copying", no_argument, &opt_copying, 1},
{"help", no_argument, NULL, 'h'},
{"device", required_argument, NULL, 'd'},
{"pic-serial-port", required_argument, NULL, 'p'},
{"input-hexfile", required_argument, NULL, 'i'},
{"output-hexfile", required_argument, NULL, 'o'},
{"ihx32", no_argument, &opt_format, hexfile::ihx32},
{"ihx16", no_argument, &opt_format, hexfile::ihx16},
{"ihx8m", no_argument, &opt_format, hexfile::ihx8m},
{"cc-hexfile", required_argument, NULL, 'c'},
{"skip-ones", no_argument, &opt_skip, 1},
{"erase", no_argument, &opt_erase, 1},
{"burn", no_argument, &opt_burn, 1},
{"force-calibration", no_argument, &opt_calibration, 1},
{"nordtsc", no_argument, &opt_nordtsc, 1},
{"rdtsc", no_argument, &opt_nordtsc, 0},
{"slow", no_argument, &opt_slow, 1},
{"reboot", no_argument, &opt_reboot, 1},
{"jdm", no_argument, &opt_hardware, (int)(picport::jdm)},
{"k8048", no_argument, &opt_hardware, (int)(picport::k8048)},
{0, 0, 0, 0}
};
int optc;
prog.init (argv);
while (0 <= (optc = getopt_long (argc, argv, short_opts, long_opts, NULL)))
switch (optc) {
case 0:
break;
case 'd':
if (!strcmp (optarg, "auto"))
opt_device = -1;
else if (-1 == (opt_device = hexfile::find_device (optarg)))
opt_usage = 1;
break;
case 'p':
opt_port = optarg;
break;
case 'i':
opt_input = optarg;
break;
case 'o':
opt_output = optarg;
break;
case 'c':
opt_cc = optarg;
break;
case 'q':
opt_quiet = 1;
break;
default: // -? -h --help unknown flag
opt_usage = 1;
}
if (!opt_quiet || opt_warranty || opt_copying || opt_usage)
// Locale charset should be respected here.
cerr << "Picprog version 1.9.1, Copyright © 2010 Jaakko Hyvätti \n"
"Picprog comes with ABSOLUTELY NO WARRANTY; for details\n"
"type `" << prog.name << " --warranty'. This is free software,\n"
"and you are welcome to redistribute it under certain conditions;\n"
"type `" << prog.name << " --copying' for details.\n\n";
if (opt_copying)
prog.copying ();
if (opt_warranty)
prog.warranty ();
if (opt_usage) {
cerr << "Full documentation is at "
"" << endl
<< "The author may be contacted at:" << endl << endl
<< "Email: Jaakko.Hyvatti@iki.fi" << endl
<< "URL: http://www.iki.fi/hyvatti/" << endl << endl
<< "Supported devices:" << endl;
hexfile::print_devices ();
cerr << endl;
prog.usage (long_opts, short_opts);
}
if (opt_warranty || opt_copying || opt_usage)
return EX_OK;
if (!opt_input && !opt_output && !opt_erase) {
cerr << "Please specify either input or output hexfile or --erase option."
<< endl;
prog.usage (long_opts, short_opts);
}
if (opt_cc && !opt_input) {
cerr << "Carbon copy does not make sense without input file." << endl;
prog.usage (long_opts, short_opts);
}
picport pic (opt_port, opt_nordtsc, opt_slow, opt_reboot,
picport::hardware_types(opt_hardware));
// if both input and output files are specified, first program the device
// and then read it.
if (opt_input || opt_erase) {
hexfile mem;
int retval;
if (EX_OK != (retval = mem.setdevice (pic, opt_device)))
return retval;
if (opt_input && EX_OK != (retval = mem.load (opt_input)))
return retval;
if (opt_burn) {
if (EX_OK != (retval = mem.program (pic, opt_erase, opt_calibration)))
return retval;
} else
cout << "No --burn option specified, device not programmed.\n";
if (opt_input && opt_cc)
if (EX_OK != (retval = mem.save (opt_cc,
hexfile::formats (opt_format),
opt_skip)))
return retval;
}
if (opt_output) {
hexfile mem;
int retval;
if (EX_OK != (retval = mem.setdevice (pic, opt_device)))
return retval;
if (EX_OK != (retval = mem.read (pic)))
return retval;
if (EX_OK != (retval = mem.save (opt_output,
hexfile::formats (opt_format),
opt_skip)))
return retval;
}
return EX_OK;
}
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/picport.cc����������������������������������������������������������������������������0000644�0000765�0000765�00000044027�11361217060�013615� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/* -*- c++ -*-
This is Picprog, Microchip PIC programmer software for the serial port device.
Copyright © 1997,2002,2003,2004,2006,2007,2008,2010 Jaakko Hyvätti
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Phone: +358 40 5011222
Please send any suggestions, bug reports, success stories etc. to the
Email address above. Include word 'picprog' in the subject line to
make sure your email passes my spam filtering.
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "picport.h"
using namespace std;
#ifndef O_NONBLOCK
#define O_NONBLOCK O_NDELAY
#endif
unsigned int picport::tsc_1000ns = 0;
// Data bitrate delay, ns.
// Cable delay is tested and this value adjusted when port is opened.
int picport::cable_delay = 0;
// Set this to -1 if you want to use nanosleep when running as root.
// This only works with 2.4 kernels, 2.6 series kernels no more work.
int picport::use_nanosleep = 0;
//
static bool disable_interrupts = 1;
void
picport::set_clock_data (int rts, int dtr)
{
if (hardware == k8048) {
rts = !rts;
dtr = !dtr;
}
// Before first call to set_clock_data, read the modem status like this:
// ioctl (fd, TIOCMGET, &modembits);
if (rts)
modembits |= TIOCM_RTS;
else
modembits &= ~TIOCM_RTS;
if (dtr)
modembits |= TIOCM_DTR;
else
modembits &= ~TIOCM_DTR;
if (0 > ioctl (fd, TIOCMSET, &modembits)) {
int e = errno;
tcsetattr (fd, TCSANOW, &saved);
cerr << "Unable to set RTS/DTR on tty " << portname << ":" << strerror (e) << endl;
exit (EX_IOERR);
}
}
void
picport::set_vpp (int vpp)
{
if (hardware == k8048)
vpp = !vpp;
if (0 > ioctl (fd, vpp ? TIOCSBRK : TIOCCBRK, 0)) {
int e = errno;
if (vpp)
ioctl (fd, TIOCCBRK, 0);
tcsetattr (fd, TCSANOW, &saved);
cerr << "Unable to " << (vpp ? "start" : "stop") << " break on tty "
<< portname << ":" << strerror (e) << endl;
exit (EX_IOERR);
}
}
picport::picport (const char *tty, bool nordtsc, bool slow, bool reboot,
hardware_types h)
: addr (0), debug_on (0), hardware (h)
{
for (int i = 0; i < 16; ++i)
W [i] = 0;
portname = new char [strlen (tty) + 1];
strcpy (portname, tty);
if (0 > (fd = open (tty, O_RDWR|O_NOCTTY|O_NONBLOCK))) {
int e = errno;
cerr << "Unable to open tty " << tty << ":" << strerror (e) << endl;
exit (EX_IOERR);
}
tcgetattr (fd, &saved);
termstate = saved;
termstate.c_iflag = IGNBRK | IGNPAR;
termstate.c_oflag = 0;
termstate.c_cflag = B9600 | CS8 | CREAD | CLOCAL;
termstate.c_lflag = 0;
tcsetattr (fd, TCSANOW, &termstate);
// Initialize lines for programming
// RTS/DTR low, sleep and then TxD high (program voltage)
ioctl (fd, TIOCCBRK, 0);
// Before first call to set_clock_data, read the modem status.
ioctl (fd, TIOCMGET, &modembits);
modembits &= ~(TIOCM_RTS | TIOCM_DTR);
ioctl (fd, TIOCMSET, &modembits);
usleep (1000);
// Check the CTS. If it is up, even when we just lowered DTR,
// we probably are not talking to a JDM type programmer.
int i = 0;
ioctl (fd, TIOCMGET, &i);
if (i & TIOCM_CTS) {
tcsetattr (fd, TCSANOW, &saved);
cerr << tty << ":CTS is high, probably we are not connected to a programmer but a modem or terminal." << endl;
exit (EX_IOERR);
}
struct sched_param scp;
scp.sched_priority = sched_get_priority_min (SCHED_FIFO);
// sched_get_priority_max()
// scp.sched_priority = 50;
cerr << "Trying realtime priority " << scp.sched_priority << endl;
if (sched_setscheduler (0, SCHED_FIFO, &scp)) {
cerr << "Cannot use real time scheduling: " << strerror(errno) << endl;
// Not root. Cannot use realtime scheduling.
use_nanosleep = 0;
}
if (iopl (3))
disable_interrupts = 0;
#ifdef CPU_SETSIZE
// When computing the delay loops, we do not want the cpu's to change.
// Pick the first cpu in the current allowed set.
cpu_set_t new_mask;
cpu_set_t cur_mask;
CPU_ZERO(&cur_mask);
CPU_ZERO(&new_mask);
if (sched_getaffinity(0, sizeof (cur_mask), &cur_mask) < 0) {
tcsetattr (fd, TCSANOW, &saved);
cerr << "Getting affinity functions do not work." << endl;
exit (EX_IOERR);
}
for (int cpuno = 0; cpuno < CPU_SETSIZE; ++cpuno)
if (CPU_ISSET (cpuno, &cur_mask)) {
CPU_SET (cpuno, &new_mask);
sched_getaffinity (0, sizeof (new_mask), &new_mask);
// We want to print informative line only if we really
// have multiple cpu's.
for (int cpuno1 = cpuno+1; cpuno1 < CPU_SETSIZE; ++cpuno1)
if (CPU_ISSET (cpuno1, &cur_mask)) {
cerr << "Bound to CPU " << cpuno << endl;
break;
}
}
#endif // CPU_SETSIZE
#ifdef RDTSC_WORKS
if (!nordtsc && !use_nanosleep && !tsc_1000ns) {
// Read /proc/cpuinfo for clock speed, or if that fails, try our
// own test.
ifstream cpui ("/proc/cpuinfo");
string w;
unsigned int mhz = 1; // 1MHz is just a flag that tsc was found
while (cpui) {
cpui >> w;
if ("MHz" == w) {
unsigned int tmp;
// Read just the integer part. No need for the rest.
cpui >> w >> tmp;
// Update this when we have 100 GHz CPUs.
if (tmp >= 4 && tmp <= 100000)
mhz = tmp;
}
if ("tsc" == w && mhz) {
// tsc capability found. Use it.
tsc_1000ns = mhz;
break;
}
}
// If the /proc fs did not contain clock speed but indicated
// tsc capability, test the approximate clock speed.
if (1 == tsc_1000ns) {
// Loop the test 20 times, and select the smallest count.
for (int recount = 0; recount < 20; ++recount) {
struct timeval tv1, tv2;
unsigned long a1, d1, a2, d2;
// Wait for when a microsecond changes
gettimeofday (&tv2, 0);
do {
gettimeofday (&tv1, 0);
} while (tv2.tv_usec == tv1.tv_usec);
asm volatile("rdtsc":"=a" (a1), "=d" (d1));
tv1.tv_usec += 1000;
if (tv1.tv_usec >= 1000000) {
tv1.tv_usec -= 1000000;
tv1.tv_sec ++;
}
do {
gettimeofday (&tv2, 0);
} while (tv2.tv_sec < tv1.tv_sec
|| (tv2.tv_sec == tv1.tv_sec && tv2.tv_usec < tv1.tv_usec));
asm volatile("rdtsc":"=a" (a2), "=d" (d2));
if (a2 < a1)
d2 --;
a2 -= a1;
a2 &= 0xffffffff; // for x86_64
d2 -= d1;
if (d2)
continue;
a2 /= 1000;
if (tsc_1000ns <= 1 || tsc_1000ns > a2)
tsc_1000ns = a2;
}
if (tsc_1000ns <= 1) {
tcsetattr (fd, TCSANOW, &saved);
cerr << "Unable to determine CPU clock speed for delay loops." << endl;
exit (EX_IOERR);
}
}
if (tsc_1000ns >= 1) {
cout << "CPU clock speed: " << tsc_1000ns << " MHz" << endl;
}
}
#endif
if (tsc_1000ns > 1 && disable_interrupts)
cerr << "Disable interrupts during delays." << endl;
if (reboot) {
// Power off any microcontroller that may be running a program.
cerr << "Power off." << endl;
set_clock_data (1, 1);
set_vpp (1);
usleep (500000); // 0.5s delay should discharge Vdd.
}
// /MCLR must go down for a while first
set_vpp (0);
usleep (10);
// Power up
set_clock_data (0, 0);
set_vpp (1);
// Charge Vdd
usleep (25000);
// Detect delays that are needed for cable lenght
bool successful_echo = false;
for (int i = 1; i <= 100; ++i) {
int data_out = i & 1;
// toggle data, keep clock off / power on
if (data_out)
modembits |= TIOCM_DTR;
else
modembits &= ~TIOCM_DTR;
ioctl (fd, TIOCMSET, &modembits);
delay (cable_delay);
int data_in;
ioctl (fd, TIOCMGET, &data_in);
data_in = 0 != (data_in & TIOCM_CTS);
delay (1000000);
successful_echo = data_out == data_in;
if (!successful_echo)
cable_delay += 100; // Another 100 ns added for cable length
ioctl (fd, TIOCMGET, &data_in);
data_in = 0 != (data_in & TIOCM_CTS);
if (data_out != data_in) {
ioctl (fd, TIOCCBRK, 0);
tcsetattr (fd, TCSANOW, &saved);
cerr << "No JDM compatible hardware detected." << endl;
exit (EX_IOERR);
}
}
set_clock_data (0, 0);
if (!successful_echo) {
ioctl (fd, TIOCCBRK, 0);
tcsetattr (fd, TCSANOW, &saved);
cerr << "Cable too long." << endl;
exit (EX_IOERR);
}
cable_delay += 100; // Another 100 ns added just for safety
if (slow && cable_delay < 10000)
cable_delay = 10000;
if (1 == use_nanosleep)
cerr << "Using " << cable_delay << " ns delays with real time priority." << endl;
else if (tsc_1000ns > 1)
cerr << "Using " << cable_delay << " ns delays." << endl;
else if (cable_delay > 1000)
cerr << "Using " << ((cable_delay + 999) / 1000) << " µs delays." << endl;
else
cerr << "Using >1 µs delays. --rdtsc may work for faster timings." << endl;
}
picport::~picport ()
{
set_vpp (0);
usleep (1);
tcsetattr (fd, TCSANOW, &saved);
close (fd);
delete [] portname;
}
void picport::reset (unsigned long reset_address)
{
set_clock_data (0, 0);
usleep (100); // Make sure we have the power there.
set_vpp (0);
usleep (50);
set_vpp (1);
usleep (10);
addr = reset_address;
}
void picport::delay (long ns)
{
if (1 == use_nanosleep) {
timespec ts = {ns / 1000000000, ns % 1000000000}, ts2;
while (nanosleep (&ts, &ts2) && EINTR == errno)
ts = ts2;
return;
}
#ifdef RDTSC_WORKS
if (tsc_1000ns > 1) {
unsigned long a1, d1, a2, d2;
if (ns <= 10000 && disable_interrupts)
asm volatile("pushf; cli");
asm volatile("rdtsc":"=a" (a1), "=d" (d1));
d2 = d1;
if (ns > 10000)
// This is not as accurate but does not overflow
a2 = 0xffffffff & (a1 + 1 + (ns+999)/1000*tsc_1000ns);
else
a2 = 0xffffffff & (a1 + 1 + (ns*tsc_1000ns + 999) / 1000);
if (a2 < a1)
d2++;
do {
asm volatile("rdtsc":"=a" (a1), "=d" (d1));
} while (d1 < d2 || (d1 == d2 && a1 < a2));
if (ns <= 10000 && disable_interrupts)
asm volatile("popf");
return;
}
// Fall back to gettimeofday() if tsc is not available.
#endif // RDTSC_WORKS
// Delay loop that should take more than a microsecond to execute.
// Check the real time clock and break out if at least the specified
// number of microseconds has gone.
struct timeval tv1, tv2;
gettimeofday (&tv2, 0);
tv2.tv_usec += 1 + (ns + 999)/1000;
if (tv2.tv_usec >= 1000000) {
tv2.tv_usec -= 1000000;
tv2.tv_sec++;
}
do {
gettimeofday (&tv1, 0);
} while (tv1.tv_sec < tv2.tv_sec
|| (tv1.tv_sec == tv2.tv_sec && tv1.tv_usec < tv2.tv_usec));
}
void picport::p_out (int b)
{
struct timeval tv1, tv2;
gettimeofday (&tv1, 0);
if (tsc_1000ns > 1 && disable_interrupts)
asm volatile("pushf; cli");
set_clock_data (1, b); // set data, clock up
delay (cable_delay);
set_clock_data (0, b); // clock down
if (tsc_1000ns > 1 && disable_interrupts)
asm volatile("popf");
gettimeofday (&tv2, 0);
// We may have spent a long time in an interrupt or in another task
// with clock down, so the pic may be pretty drained for power now.
// Recharge at least as long as we were without power.
long matching_delay = (tv2.tv_sec-tv1.tv_sec) * 1000000 + tv2.tv_usec - tv1.tv_usec;
if (matching_delay > 10) // 10 µs should be enough to charge up
matching_delay = 10;
matching_delay *= 1000;
if (matching_delay < cable_delay)
matching_delay = cable_delay;
delay (matching_delay);
}
int picport::p_in ()
{
struct timeval tv1, tv2;
gettimeofday (&tv1, 0);
if (tsc_1000ns > 1 && disable_interrupts)
asm volatile("pushf; cli");
set_clock_data (1, 1); // clock up
delay (cable_delay);
set_clock_data (0, 1); // set data up, clock down
if (tsc_1000ns > 1 && disable_interrupts)
asm volatile("popf");
gettimeofday (&tv2, 0);
// We may have spent a long time in an interrupt or in another task
// with clock down, so the pic may be pretty drained for power now.
// Recharge at least as long as we were without power.
long matching_delay = (tv2.tv_sec-tv1.tv_sec) * 1000000 + tv2.tv_usec - tv1.tv_usec;
if (matching_delay > 10) // 10 µs should be enough to charge up
matching_delay = 10;
matching_delay *= 1000;
if (matching_delay < cable_delay)
matching_delay = cable_delay;
delay (matching_delay);
int i;
ioctl (fd, TIOCMGET, &i);
i = 0 != (i & TIOCM_CTS);
if (hardware == k8048)
return !i;
return i;
}
int picport::command18 (enum commands18 comm, int data)
{
int i, shift = comm;
if (nop_prog == comm) {
// A programming command must leave the last bit clock pulse up
p_out (0);
p_out (0);
p_out (0);
set_clock_data (1, 0); // clock up
delay (1000*1000); // P9 >1 ms programming time
set_clock_data (0, 0); // clock down
// P10 >5 µs high voltage discharge time
// Later models listed as > 100 µs
delay (100*1000);
} else {
for (i = 0; i < 4; i++)
p_out ((shift >> i) & 1);
set_clock_data (0, 0); // set data down
delay (1000);
}
shift = 0; // default return value
switch (comm) {
case nop_erase:
// Erase cycle has delay between command and data
usleep (10000); // P11 5 ms + P10 5 µs erase time
// FALLTHROUGH
case instr:
case nop_prog:
if (0x0e00 == (data & 0xff00))
W[0] = data & 0x00ff;
else if (0x6ef8 == data)
addr = (addr & 0x00ffff) | (W[0] << 16);
else if (0x6ef7 == data)
addr = (addr & 0xff00ff) | (W[0] << 8);
else if (0x6ef6 == data)
addr = (addr & 0xffff00) | W[0];
goto sw;
case twrite_dec2:
addr -= 2;
goto sw;
case twrite_inc2:
addr += 2;
// FALLTHROUGH
case twrite:
case twrite_prog:
sw:
for (i = 0; i < 16; i++)
p_out ((data >> i) & 1);
set_clock_data (0, 0); // set data down
break;
case tread_dec:
--addr;
goto sr;
case tread_inc:
case inc_tread:
++addr;
// FALLTHROUGH
case shift_out:
case tread:
sr:
for (i = 0; i < 8; i++)
p_out(0);
delay (1000);
for (i = 0; i < 8; i++)
shift |= p_in () << i;
set_clock_data (0, 0); // set data down
}
delay (1000);
return shift;
}
int picport::command30 (enum commands30 comm, int data)
{
int i, shift = comm;
for (i = 0; i < 4; i++)
p_out ((shift >> i) & 1);
shift = 0; // default return value
switch (comm) {
case SIX:
if (0x200000 == (data & 0xff0000))
W[data & 15] = (data & 0x0ffff0) >> 4;
else if (0xEB0000 == (data & 0xfff87f))
W[(data >> 7) & 15] = 0;
else if (0xBA1830 == (data & 0xfff870)) {
// TBLRDL
++W[(data >> 7) & 15];
++W[data & 15];
} else if (0xBA0830 == (data & 0xfff870)) {
// TBLRDL
++W[(data >> 7) & 15];
++W[data & 15];
} else if (0x880190 == (data & 0xfffff0))
addr = (W[data & 15] << 16) & 0xff0000;
addr = (addr & 0xff0000) | W[6];
for (i = 0; i < 24; i++)
p_out ((data >> i) & 1);
break;
case REGOUT:
for (i = 0; i < 8; i++)
p_out(0);
for (i = 0; i < 16; i++)
shift |= p_in () << i;
}
set_clock_data (0, 0); // set data down
return shift;
}
void picport::setaddress (unsigned long a)
{
if (0 != a && addr == a)
return;
command18 (instr, 0x0e00 | ((a & 0xff0000) >> 16));
command18 (instr, 0x6ef8);
command18 (instr, 0x0e00 | ((a & 0x00ff00) >> 8));
command18 (instr, 0x6ef7);
command18 (instr, 0x0e00 | (a & 0x0000ff));
command18 (instr, 0x6ef6);
}
void picport::setaddress30 (unsigned long a)
{
if (0 != a && addr == a)
return;
command30 (SIX, 0x200000 | ((a & 0xff0000) >> 12)); // MOV #, W0
command30 (SIX, 0x880190); // MOV W0, TBLPAG
command30 (SIX, 0x200006 | ((a & 0x00ffff) << 4)); // MOV #, W6
}
// -1 == error, no programmer present
int picport::command (enum commands comm, int data)
{
int tmp1, tmp2;
// first, send out the command, 6 bits
int i, shift = comm;
for (i = 0; i < 6; i++)
p_out ((shift >> i) & 1);
set_clock_data (0, 0); // set data down
shift = 0; // default return value
switch (comm) {
case inc_addr:
++addr;
if (data != 0) { // 12f508 and 12f509
if (addr >= (unsigned long)(data))
addr = 0;
break;
}
if (addr >= 0x4000)
addr = 0x2000;
break;
case data_from_prog:
case data_from_data:
delay (1000);
tmp1 = p_in ();
for (i = 0; i < 14; i++)
shift |= p_in () << i;
tmp2 = p_in ();
set_clock_data (0, 0); // set data down
#ifdef CHECK_START_STOP
// Start and stop bits must be 1. Most of the old chips at least
// conform to this test, but apparently pic12f635 and some other
// later chips do not.
if (!tmp1 || !tmp2) {
cerr << portname << ":PIC programmer missing or chip fault" << endl;
return -1;
}
#endif
if (data_from_data == comm) {
// Check that the leftover bits were valid, all 1's.
// This detects if the programmer is not connected to the port.
// Unfortunately later chips clear these bits, so we must
// accept both all 1's and all 0's.
if ((shift & 0x3f00) != 0x3f00
&& (shift & 0x3f00) != 0x0000) {
cerr << portname << ": read value "
<< hex << setfill('0') << setw(4) << shift << dec
<< ": PIC programmer or chip fault\n"
"Is code protection enabled? "
"Use --erase option to disable code protection." << endl;
return -1;
}
shift &= 0xff;
}
break;
case load_conf:
addr = 0x2000;
// FALLTHROUGH
case data_for_prog:
case data_for_data:
delay (1000);
p_out (0);
for (i = 0; i < 14; i++)
p_out ((data >> i) & 1);
p_out (0);
set_clock_data (0, 0); // set data down
break;
default:
;
}
delay (1000);
return shift;
}
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������picprog-1.9.1/program.cc����������������������������������������������������������������������������0000644�0000765�0000765�00000113165�11361223442�013605� 0����������������������������������������������������������������������������������������������������ustar �jaakko��������������������������me���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/*
This is a generic program misc functions class v1.0.
Copyright � 1997,2002,2003,2004,2008,2010 Jaakko Hyv�tti
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see http://www.gnu.org/licenses/ .
The author may be contacted at:
Email: Jaakko.Hyvatti@iki.fi
URL: http://www.iki.fi/hyvatti/
Phone: +358 40 5011222
Please send any suggestions, bug reports, success stories etc. to the
Email address above. Include word 'picprog' in the subject line to
make sure your email passes my spam filtering.
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include "program.h"
using namespace std;
program::program ()
{
name = 0;
}
program::~program ()
{
if (name)
delete[] name;
}
void program::init (char *argv [])
{
char *p;
if (argv && argv [0] && argv [0][0]) {
if (name)
delete[] name;
if ((p = strrchr (argv [0], '/')))
p++;
else
p = argv [0];
name = new char [strlen (p)+1];
strcpy (name, p);
}
}
const char program::copying_t [] =
" GNU GENERAL PUBLIC LICENSE\n\
Version 3, 29 June 2007\n\
\n\
Copyright (C) 2007 Free Software Foundation, Inc.
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
#ifndef O_NONBLOCK
#define O_NONBLOCK O_NDELAY
#endif
int modem_signals[] = {
TIOCM_CD,
TIOCM_RI,
TIOCM_CTS,
TIOCM_DSR,
TIOCM_RTS,
TIOCM_DTR
};
const char * modem_signal_names[] = {
"CD",
"RI",
"CTS",
"DSR",
"RTS",
"DTR"
};
const int num_signals = sizeof(modem_signals) / sizeof(modem_signals[0]);
int
main (int argc, char **argv)
{
int fd;
struct termios saved, termstate, ttysaved, ttystate;
int modembits;
const char *portname;
bool break_on = false;
int signal_mask = 0;
for (int s = 0; s < num_signals; ++s)
signal_mask |= modem_signals[s];
if (argc != 2) {
cerr << "Usage: " << argv[0] << " /dev/ttyS0" << endl;
exit (1);
}
portname = argv[1];
cout << "Keys:" << endl
<< "q\tquit" << endl
<< "b\ttoggle break" << endl
<< "r\ttoggle rts" << endl
<< "d\ttoggle dtr" << endl
<< "\tother keys transmit that char." << endl
;
if (0 > (fd = open (portname, O_RDWR|O_NOCTTY|O_NONBLOCK))) {
int e = errno;
cerr << "Unable to open tty " << portname << ":" << strerror (e) << endl;
exit (EX_IOERR);
}
tcgetattr (fd, &saved);
termstate = saved;
termstate.c_iflag = IGNBRK | IGNPAR;
termstate.c_oflag = 0;
termstate.c_cflag = B9600 | CS8 | CREAD | CLOCAL;
termstate.c_lflag = 0;
termstate.c_cc[VMIN] = 0;
termstate.c_cc[VTIME] = 0;
tcsetattr (fd, TCSANOW, &termstate);
ioctl (fd, TIOCMGET, &modembits);
if (isatty (0)) {
tcgetattr (0, &ttysaved);
ttystate = ttysaved;
ttystate.c_iflag = IGNBRK | IGNPAR;
ttystate.c_oflag = OPOST | ONLCR;
ttystate.c_cflag = B9600 | CS8 | CREAD | CLOCAL;
ttystate.c_lflag = 0;
ttystate.c_cc[VMIN] = 0;
ttystate.c_cc[VTIME] = 0;
tcsetattr (0, TCSANOW, &ttystate);
cout << "Terminal set up." << endl;
}
for (;;) {
int n;
char instr[2];
n = read (0, instr, 1);
if (n < 0) {
int e = errno;
cerr << "Read error on tty " << strerror (e) << endl;
break;
}
if (n == 1) {
if (instr[0] == 'q' || instr[0] == 3)
break;
if (instr[0] == 'b') {
break_on = !break_on;
if (0 > ioctl (fd, break_on ? TIOCSBRK : TIOCCBRK, 0)) {
int e = errno;
cerr << "Unable to set break on tty "
<< portname << ":" << strerror (e) << endl;
break;
}
continue;
}
if (instr[0] == 'r') {
int newmodem = modembits;
newmodem ^= TIOCM_RTS;
ioctl (fd, TIOCMSET, &newmodem);
continue;
}
if (instr[0] == 'd') {
int newmodem = modembits;
newmodem ^= TIOCM_DTR;
ioctl (fd, TIOCMSET, &newmodem);
continue;
}
cout << "OUT: 0x" << hex << int(instr[0]) << dec << endl;
if (1 != write (fd, instr, 1)) {
cerr << "Write err" << strerror(errno) << endl;
break;
}
continue;
} // read 1 char from keyboard
n = read (fd, instr, 1);
if (n < 0) {
int e = errno;
cerr << "Read error on serial port " << strerror (e) << endl;
break;
}
if (n == 1) {
cout << "IN: 0x" << hex << int(instr[0]) << dec << endl;
}
int newmodem;
ioctl (fd, TIOCMGET, &newmodem);
if ((newmodem & signal_mask) != (modembits & signal_mask)) {
string message;
for (int s = 0; s < num_signals; ++s) {
string sstate
= ((newmodem & modem_signals[s]) ? string("+") : string("-"))
+ string(modem_signal_names[s]);
cout << sstate << ' ';
if ((newmodem & modem_signals[s]) != (modembits & modem_signals[s])) {
message += " " + sstate;
}
}
cout << ':' << message << endl;
modembits = newmodem;
}
} // for ever;
if (isatty (0)) {
tcsetattr (0, TCSANOW, &ttysaved);
}
tcsetattr (fd, TCSANOW, &saved);
close (fd);
cout << "Quit." << endl;
return 0;
}
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������� 

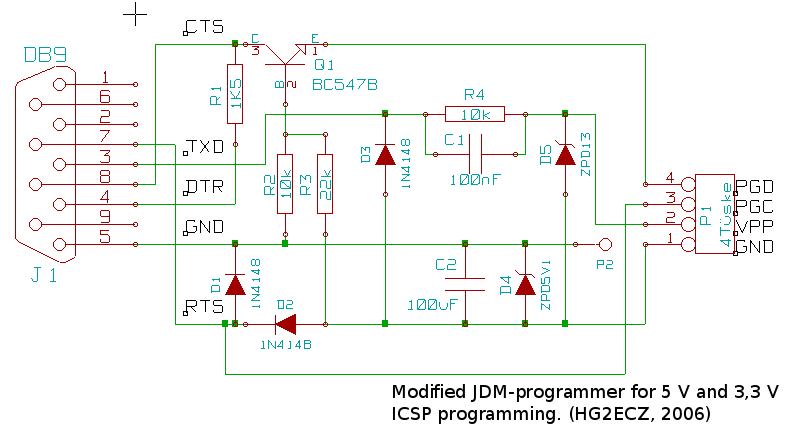{kind=link}
{kind=link}
{kind=link}