 _asammdf_ is a fast parser and editor for ASAM (Association for Standardization of Automation and Measuring Systems) MDF (Measurement Data Format) files.
_asammdf_ supports MDF versions 2 (.dat), 3 (.mdf) and 4 (.mf4).
_asammdf_ works on Python >= 3.10




[](https://mypy-lang.org/)
[](https://github.com/pre-commit/pre-commit)
[](https://github.com/astral-sh/ruff)
---
## Status
| Continuous Integration | Coveralls | Codacy | ReadTheDocs |
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ | ----------------------------------------------------------------------------------------------------------------------------------------------- |
| [](https://github.com/danielhrisca/asammdf/actions/workflows/main.yml) | [](https://coveralls.io/github/danielhrisca/asammdf?branch=master) | [](https://www.codacy.com/app/danielhrisca/asammdf?utm_source=github.com&utm_medium=referral&utm_content=danielhrisca/asammdf&utm_campaign=badger) | [](http://asammdf.readthedocs.io/en/master/?badge=stable) |
| PyPI | conda-forge |
| ----------------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------- |
| [](https://badge.fury.io/py/asammdf) | [](https://anaconda.org/conda-forge/asammdf) |
## Project goals
The main goals for this library are:
- to be faster than the other Python-based mdf libraries
- to have clean and easy-to-understand code base
- to have minimal 3rd party dependencies
## Features
- create new mdf files from scratch
- append new channels
- read unsorted MDF v3 and v4 files
- read CAN and LIN bus logging files
- extract CAN and LIN signals from anonymous bus logging measurements
- filter a subset of channels from original mdf file
- cut measurement to specified time interval
- convert to different mdf version
- export to pandas, HDF5, Matlab (v7.3), CSV and parquet
- merge multiple files sharing the same internal structure
- read and save mdf version 4.10 files containing zipped data blocks
- space optimizations for saved files (no duplicated blocks)
- split large data blocks (configurable size) for mdf version 4
- full support (read, append, save) for the following map types (multidimensional array channels):
- mdf version 3 channels with CDBLOCK
- mdf version 4 structure channel composition
- mdf version 4 channel arrays with CNTemplate storage and one of the array types:
- 0 - array
- 1 - scaling axis
- 2 - look-up
- add and extract attachments for mdf version 4
- handle large files (for example merging two files, each with 14000 channels and 5GB size, on a RaspberryPi)
- extract channel data, master channel and extra channel information as _Signal_ objects for unified operations with v3 and v4 files
- time domain operation using the _Signal_ class
- pandas DataFrames are good if all the channels have the same time base
- a measurement will usually have channels from different sources at different rates
- the _Signal_ class facilitates operations with such channels
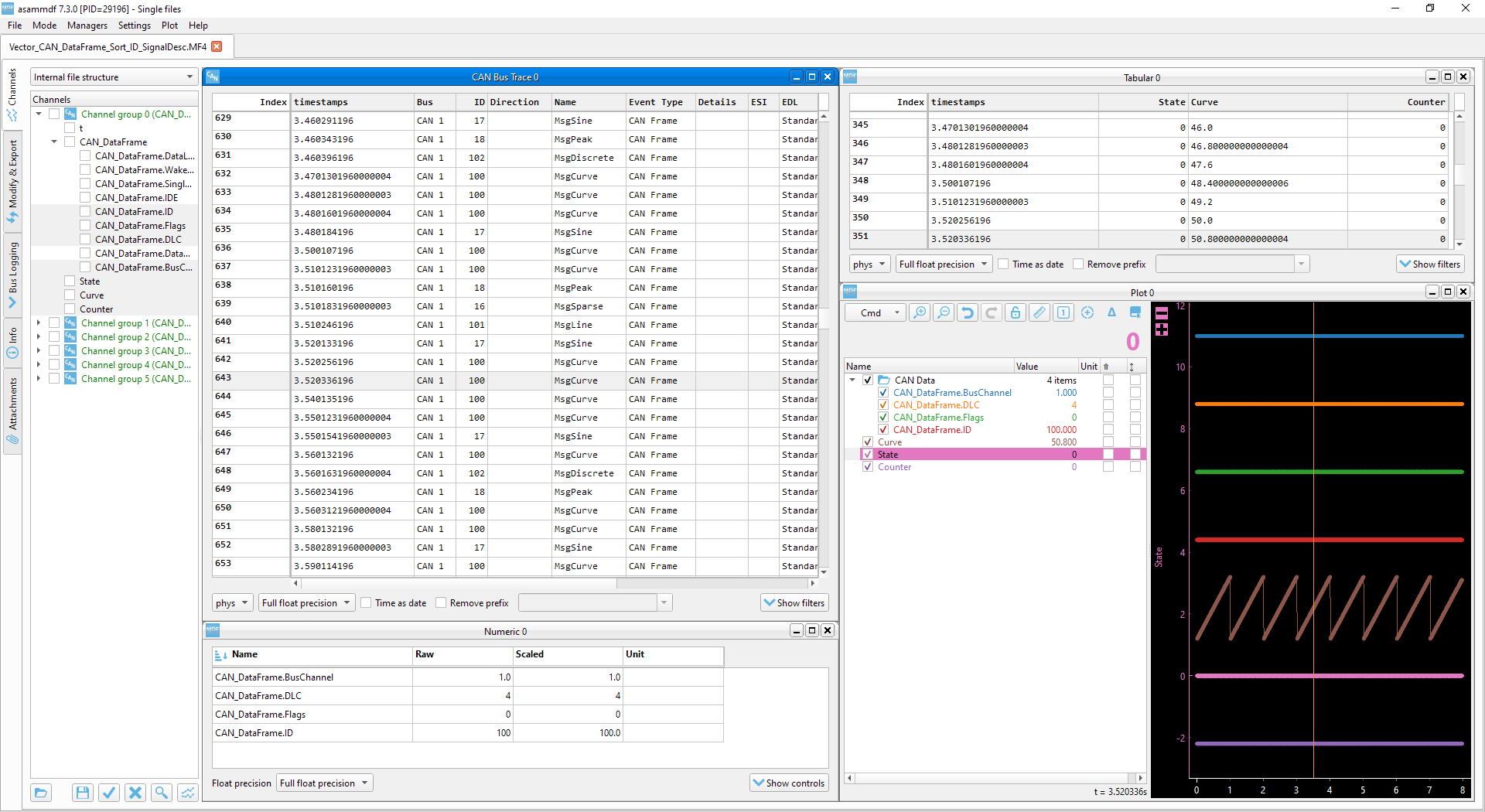
- graphical interface to visualize channels and perform operations with the files
## Major features not implemented (yet)
- for version 3
- functionality related to sample reduction block: the sample reduction blocks are simply ignored
- for version 4
- experimental support for MDF v4.20 column oriented storage
- functionality related to sample reduction block: the sample reduction blocks are simply ignored
- handling of channel hierarchy: channel hierarchy is ignored
- full handling of bus logging measurements: currently only CAN and LIN bus logging are implemented with the
ability to _get_ signals defined in the attached CAN/LIN database (.arxml or .dbc). Signals can also
be extracted from an anonymous bus logging measurement by providing a CAN or LIN database (.dbc or .arxml)
- handling of unfinished measurements (mdf 4): finalization is attempted when the file is loaded, however
not all the finalization steps are supported
- full support for remaining mdf 4 channel arrays types
- xml schema for MDBLOCK: most metadata stored in the comment blocks will not be available
- full handling of event blocks: events are transferred to the new files (in case of calling methods
that return new _MDF_ objects) but no new events can be created
- channels with default X axis: the default X axis is ignored and the channel group's master channel
is used
- attachment encryption/decryption using user provided encryption/decryption functions; this is not
part of the MDF v4 spec and is only supported by this library
## Usage
```python
from asammdf import MDF
mdf = MDF('sample.mdf')
speed = mdf.get('WheelSpeed')
speed.plot()
important_signals = ['WheelSpeed', 'VehicleSpeed', 'VehicleAcceleration']
# get short measurement with a subset of channels from 10s to 12s
short = mdf.filter(important_signals).cut(start=10, stop=12)
# convert to version 4.10 and save to disk
short.convert('4.10').save('important signals.mf4')
# plot some channels from a huge file
efficient = MDF('huge.mf4')
for signal in efficient.select(['Sensor1', 'Voltage3']):
signal.plot()
```
Check the _examples_ folder for extended usage demo, or the documentation
_asammdf_ is a fast parser and editor for ASAM (Association for Standardization of Automation and Measuring Systems) MDF (Measurement Data Format) files.
_asammdf_ supports MDF versions 2 (.dat), 3 (.mdf) and 4 (.mf4).
_asammdf_ works on Python >= 3.10




[](https://mypy-lang.org/)
[](https://github.com/pre-commit/pre-commit)
[](https://github.com/astral-sh/ruff)
---

## Status
| Continuous Integration | Coveralls | Codacy | ReadTheDocs |
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ | ----------------------------------------------------------------------------------------------------------------------------------------------- |
| [](https://github.com/danielhrisca/asammdf/actions/workflows/main.yml) | [](https://coveralls.io/github/danielhrisca/asammdf?branch=master) | [](https://www.codacy.com/app/danielhrisca/asammdf?utm_source=github.com&utm_medium=referral&utm_content=danielhrisca/asammdf&utm_campaign=badger) | [](http://asammdf.readthedocs.io/en/master/?badge=stable) |
| PyPI | conda-forge |
| ----------------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------- |
| [](https://badge.fury.io/py/asammdf) | [](https://anaconda.org/conda-forge/asammdf) |
## Project goals
The main goals for this library are:
- to be faster than the other Python-based mdf libraries
- to have clean and easy-to-understand code base
- to have minimal 3rd party dependencies
## Features
- create new mdf files from scratch
- append new channels
- read unsorted MDF v3 and v4 files
- read CAN and LIN bus logging files
- extract CAN and LIN signals from anonymous bus logging measurements
- filter a subset of channels from original mdf file
- cut measurement to specified time interval
- convert to different mdf version
- export to pandas, HDF5, Matlab (v7.3), CSV and parquet
- merge multiple files sharing the same internal structure
- read and save mdf version 4.10 files containing zipped data blocks
- space optimizations for saved files (no duplicated blocks)
- split large data blocks (configurable size) for mdf version 4
- full support (read, append, save) for the following map types (multidimensional array channels):
- mdf version 3 channels with CDBLOCK
- mdf version 4 structure channel composition
- mdf version 4 channel arrays with CNTemplate storage and one of the array types:
- 0 - array
- 1 - scaling axis
- 2 - look-up
- add and extract attachments for mdf version 4
- handle large files (for example merging two files, each with 14000 channels and 5GB size, on a RaspberryPi)
- extract channel data, master channel and extra channel information as _Signal_ objects for unified operations with v3 and v4 files
- time domain operation using the _Signal_ class
- pandas DataFrames are good if all the channels have the same time base
- a measurement will usually have channels from different sources at different rates
- the _Signal_ class facilitates operations with such channels
- graphical interface to visualize channels and perform operations with the files
## Major features not implemented (yet)
- for version 3
- functionality related to sample reduction block: the sample reduction blocks are simply ignored
- for version 4
- experimental support for MDF v4.20 column oriented storage
- functionality related to sample reduction block: the sample reduction blocks are simply ignored
- handling of channel hierarchy: channel hierarchy is ignored
- full handling of bus logging measurements: currently only CAN and LIN bus logging are implemented with the
ability to _get_ signals defined in the attached CAN/LIN database (.arxml or .dbc). Signals can also
be extracted from an anonymous bus logging measurement by providing a CAN or LIN database (.dbc or .arxml)
- handling of unfinished measurements (mdf 4): finalization is attempted when the file is loaded, however
not all the finalization steps are supported
- full support for remaining mdf 4 channel arrays types
- xml schema for MDBLOCK: most metadata stored in the comment blocks will not be available
- full handling of event blocks: events are transferred to the new files (in case of calling methods
that return new _MDF_ objects) but no new events can be created
- channels with default X axis: the default X axis is ignored and the channel group's master channel
is used
- attachment encryption/decryption using user provided encryption/decryption functions; this is not
part of the MDF v4 spec and is only supported by this library
## Usage
```python
from asammdf import MDF
mdf = MDF('sample.mdf')
speed = mdf.get('WheelSpeed')
speed.plot()
important_signals = ['WheelSpeed', 'VehicleSpeed', 'VehicleAcceleration']
# get short measurement with a subset of channels from 10s to 12s
short = mdf.filter(important_signals).cut(start=10, stop=12)
# convert to version 4.10 and save to disk
short.convert('4.10').save('important signals.mf4')
# plot some channels from a huge file
efficient = MDF('huge.mf4')
for signal in efficient.select(['Sensor1', 'Voltage3']):
signal.plot()
```
Check the _examples_ folder for extended usage demo, or the documentation